
AI出海最魔幻的一幕出现了:新加坡人想打进国内,中国人急着走向海外”
AI出海最魔幻的一幕出现了:新加坡人想打进国内,中国人急着走向海外”新加坡AI Agent 峰会台上四个人,焦虑方向正好相反。
来自主题: AI资讯
9037 点击 2026-06-19 10:18
 搜索
搜索
新加坡AI Agent 峰会台上四个人,焦虑方向正好相反。

覆盖五大赛道,累计融资数十亿。
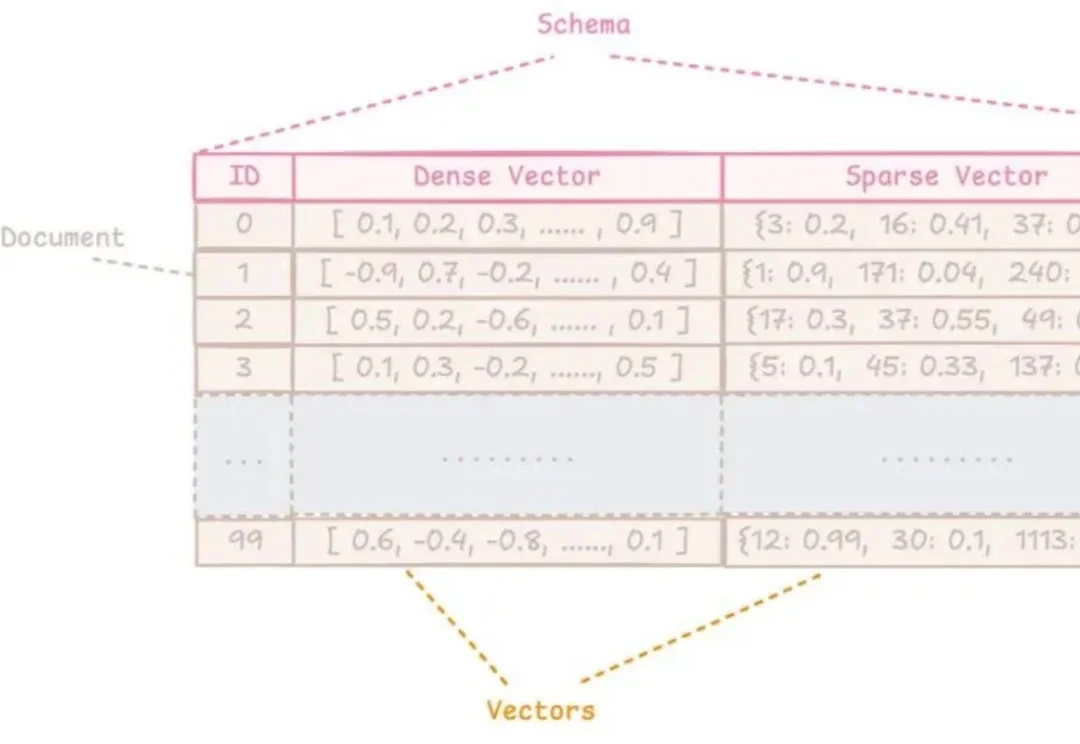
阿里开源的生产级向量数据库,跑在进程里,亿级数据毫秒响应

郝景芳说自己已经越来越多地使用AI创作,小说《银河学院》中的AI创作占比已经达50%。
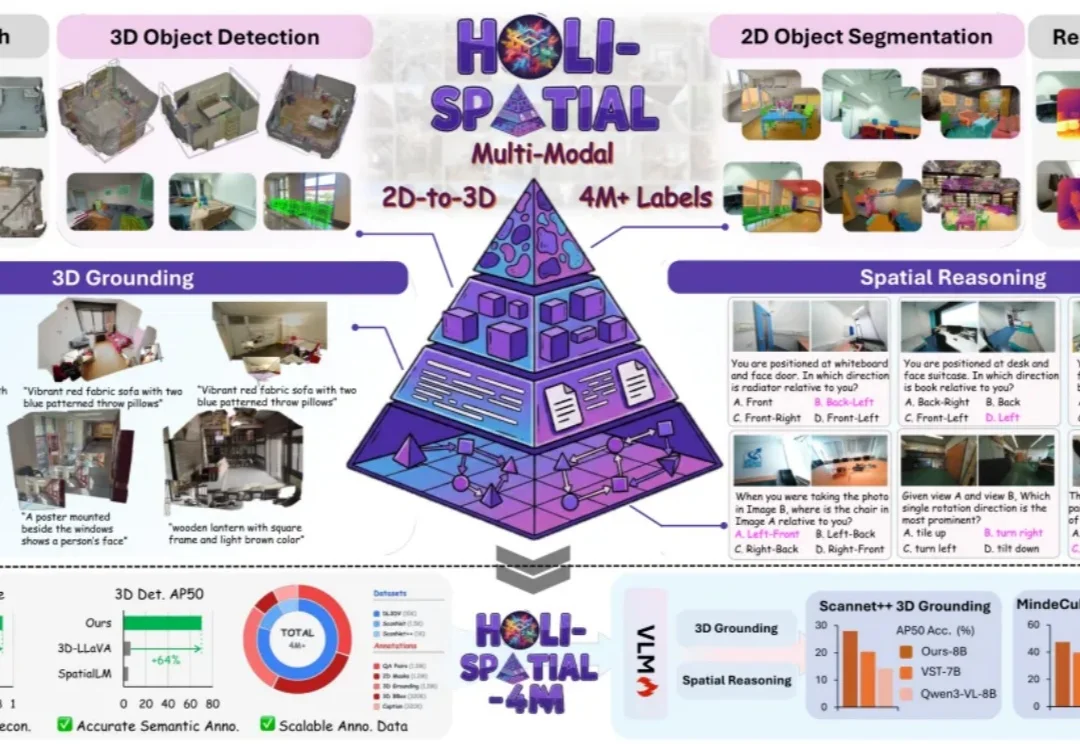
从原始视频出发,无需人工介入,自动生成 3D 重建、深度、2D mask、3D 框、实例描述、3D grounding 和空间问答。Holi-Spatial 试图把「空间智能」的数据生产,推进到自动化、可扩展的新阶段。
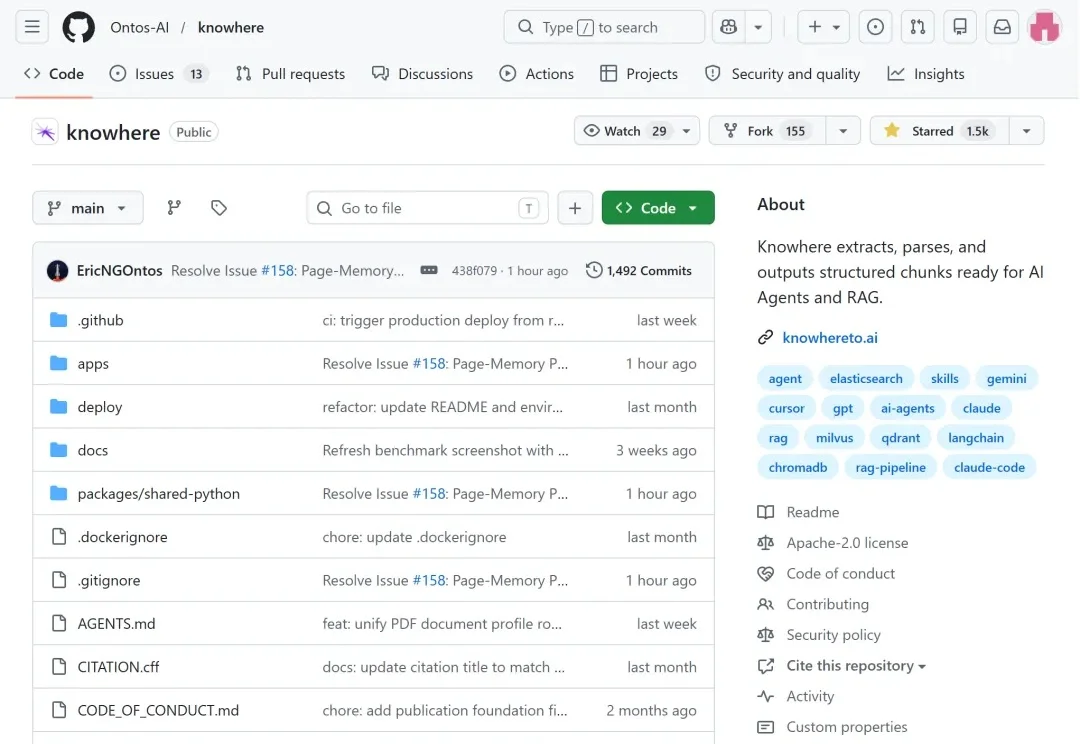
2026 年 5 月 7 日,我们把 Knowhere 的完整技术栈开源了。

PD大促还有两个周就开始了,不知道做亚马逊的你们词库搭好了吗?
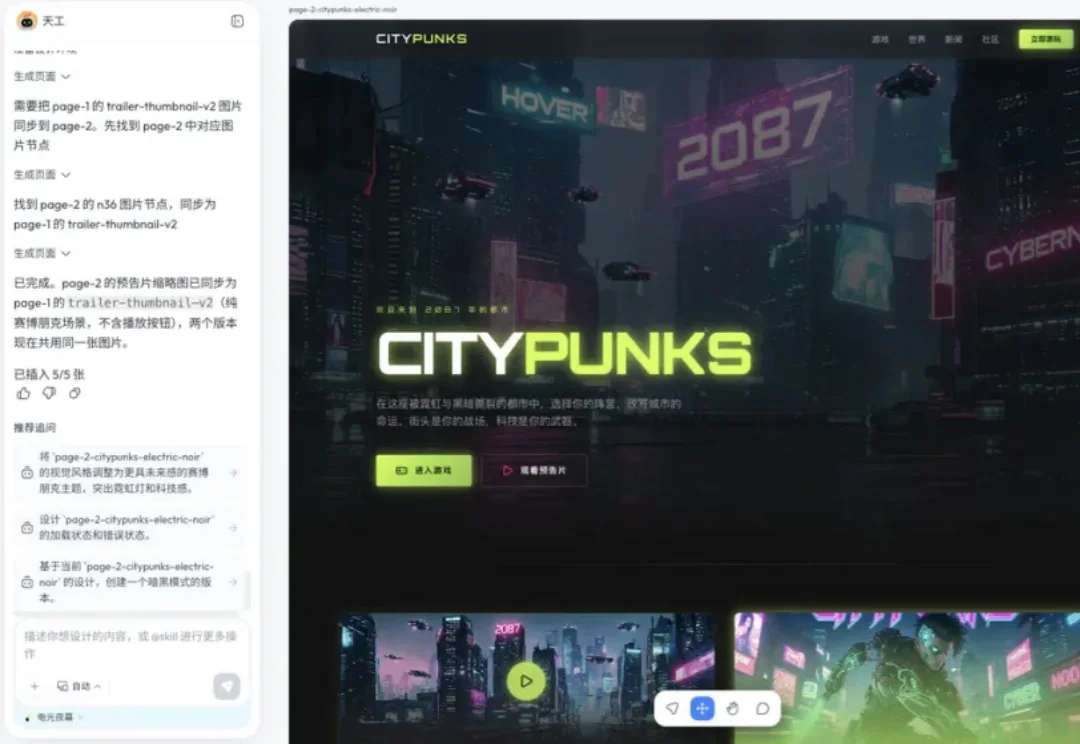
你有没有想过,做一个网站这件事,可能根本不需要会设计,也不需要会写代码?这听起来有点反常识,但天工刚好就在往这个方向走。6月15日,天工设计智能体正式在 tiangong.cn 全面上线,我看完它的介绍之后第一反应是,这不是又一个做图工具,这是想直接把从想法到产品原型这条路给压缩掉。
在做 Agent Memory 工程化探索的这几个月里,我经常有种被概念淹没的窒息。图结构记忆、AutoMemory、做梦机制、各种层出不穷的 Memory 框架……整个技术社区似乎陷入了一种每遇到一个新场景就要发明一套新词汇的群体焦虑中。
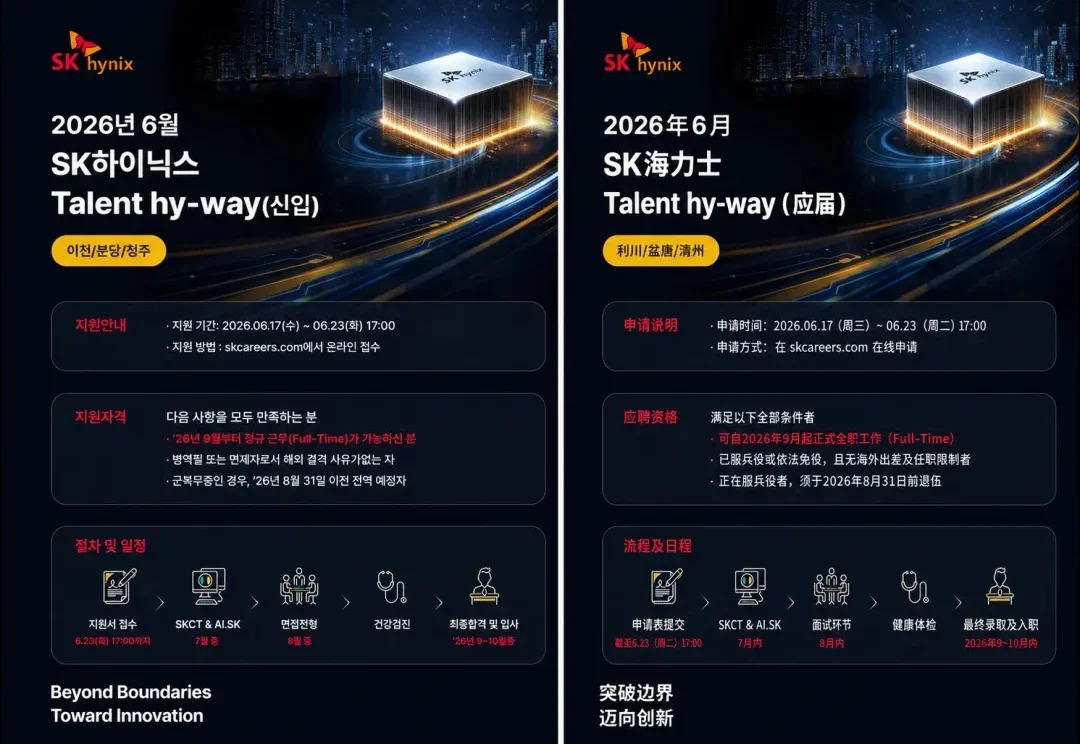
高中毕业, 也能进芯片研发部了。