
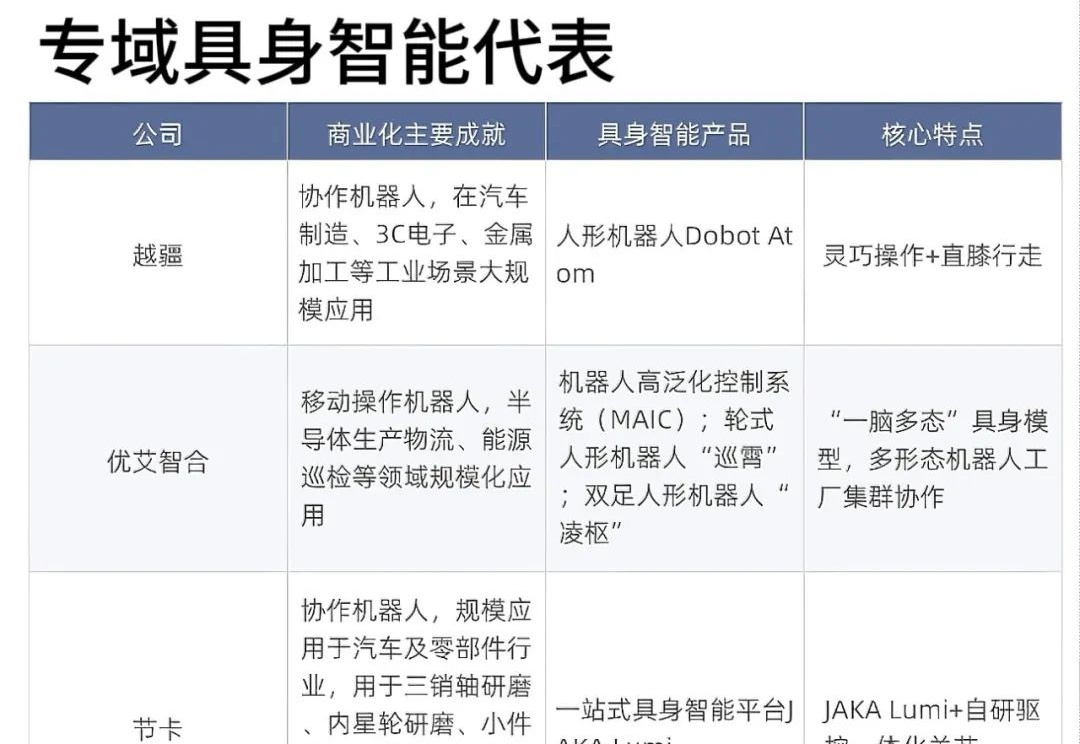
深度观察:盘点八家“明星”专域型具身智能机器人,为何有望率先完成商业化?
深度观察:盘点八家“明星”专域型具身智能机器人,为何有望率先完成商业化?场景不要“看起来炫酷”,而是真的“好用”。
来自主题: AI资讯
9371 点击 2025-06-20 10:24
场景不要“看起来炫酷”,而是真的“好用”。

服务业卷成麻花,什么样的人形机器人能抢到第一桶金?刚刚出道的「小腰精」,不仅颜值在线,功能更是惊掉下巴——讲解、导览、引流、蹲地干活样样精通,在商场、景区、学校人气爆棚,还是个做家务好能手,堪称服务界全能ACE!
当 AI 放下海德格尔的锤子时,意味着机器人已经能够熟练使用工具,工具会“隐退”成为本体的延伸,而不再是需要刻意思考的对象。

近期,人工智能领域对“具身智能”的讨论持续升温——如何让AI不仅能“理解”语言,还能用“手”去感知世界、操作环境、完成任务?相比语言模型的迅猛发展,真正通向Agent的下一步,需要AI具备跨模态感知、动作控制与现实泛化能力。具身智能让AI不仅能“思考”,更能“感知”“行动”。

近日,南京因克斯智能科技有限公司(以下简称“因克斯”)宣布,继2024年10月完成首轮天使轮融资之后,已连续完成两轮新的融资,新投资方包括锦秋基金、德石投资、深创投集团、复星创富等知名投资机构,同时绿洲资本、水木创投、拉尔夫创投等天使轮投资方持续追加投资。明论资本担任独家财务顾问。

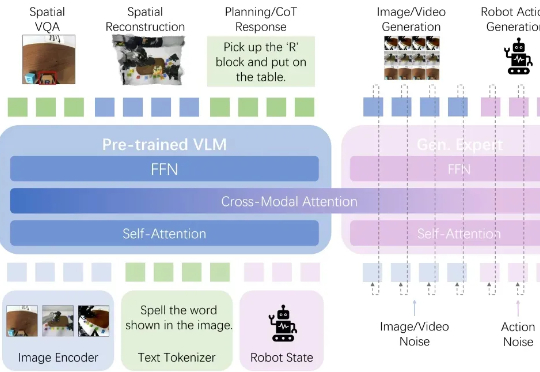
只用一个模型,就能边思考边动手,涮火锅、调鸡尾酒,还能听你指挥、自己纠错 —— 未来通用机器人的关键一跃,或许已经到来。
有效解决真机数据稀缺与场景泛化的矛盾。

百事可乐首个人形机器人「百事蓝宝」正式C位出道!现场与大卫·贝克汉姆、智元机器人联合创始人兼首席技术官彭志辉同框互动,进行传统文化太极表演,这一出场,瞬间刷屏社交媒体,让人切实感受到:机器人不仅能说会道,更能成为品牌传递情绪价值的新出口。

真是屋漏偏逢连夜雨! 就在特斯拉创下单日最大跌幅,市值蒸发1500亿美元(折合人民币约10784亿元)之际,马斯克又痛失一位悍将——
与OpenAI分道扬镳后,Figure 02开启日夜进厂打工模式。