CVPR 2025|复旦&微软开源StableAnimator: 首个端到端ID一致性人类视频生成,Github Star破千
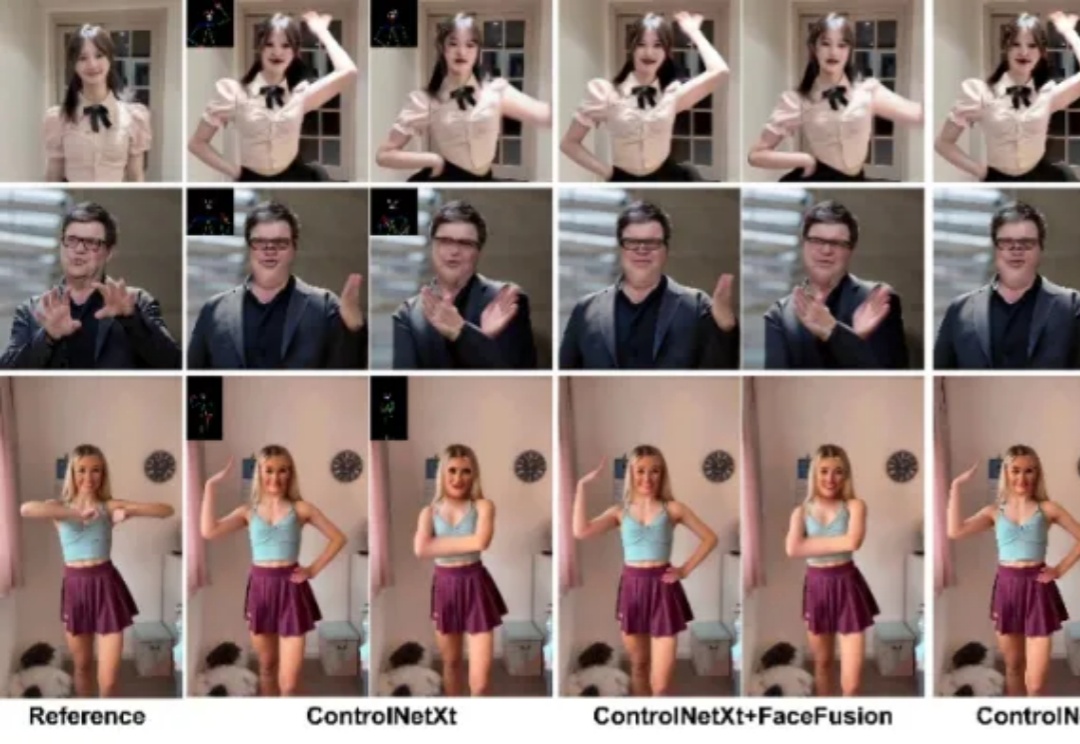
CVPR 2025|复旦&微软开源StableAnimator: 首个端到端ID一致性人类视频生成,Github Star破千近年来,扩散模型在图像与视频合成领域展现出强大能力,为图像动画技术的发展带来了新的契机。特别是在人物图像动画方面,该技术能够基于一系列预设姿态驱动参考图像,使其动态化,从而生成高度可控的人体动画视频。
来自主题: AI技术研报
10209 点击 2025-03-20 09:34