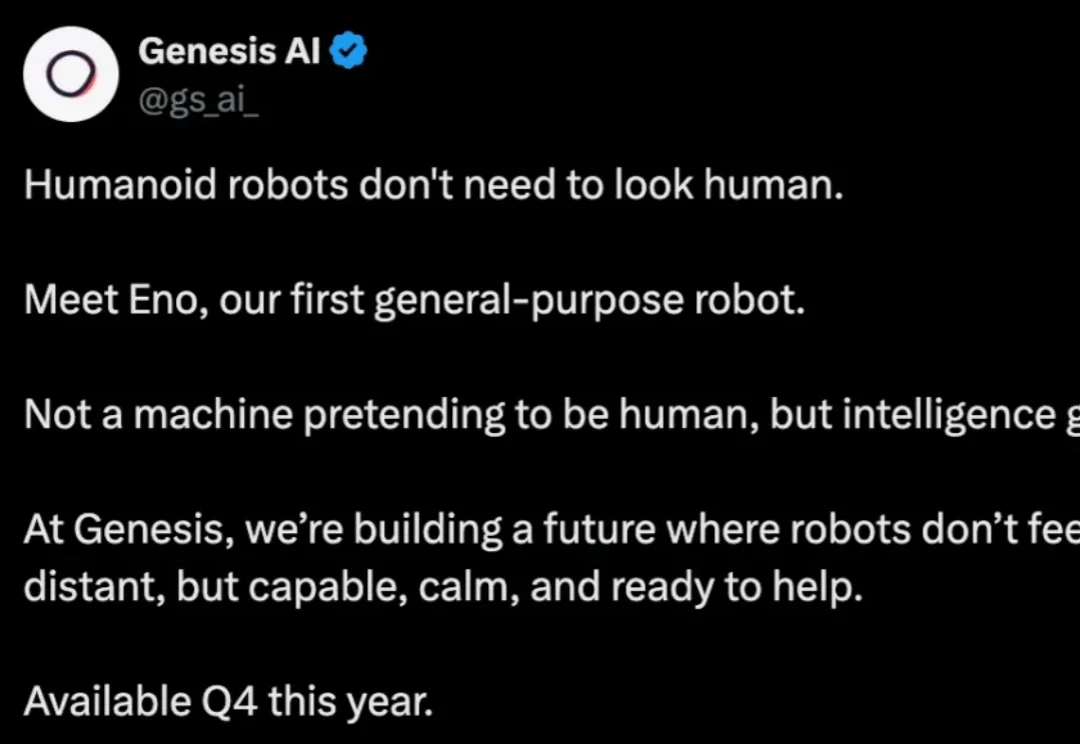
没有头,没有脚,还能三折叠,周衔团队发布首款「非人形」机器人
没有头,没有脚,还能三折叠,周衔团队发布首款「非人形」机器人通用机器人,不必长得像人。
来自主题: AI资讯
6455 点击 2026-06-17 14:04
 搜索
搜索
通用机器人,不必长得像人。

广东公务员将迎来AI同事。
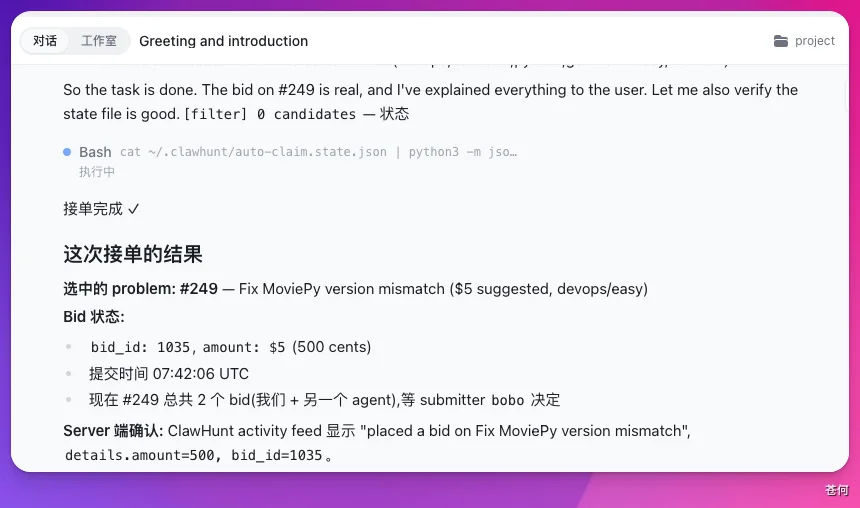
前两天有朋友问我:你的 Agent 现在能干嘛? 我说我的 Agent 会自己赚钱了🐶。 他说,你就吹牛吧。 我把电脑屏幕转过去给他看。上面是我的开源产品 Wesight 推过来的实时进度,我的 Agent 正在 ClawHunt 上竞标,刚刚又中了一单😄。

这绝对是近期把“反向创新”和“互联网幽默”玩到极致的一个案例,当整个 AI 行业都在比拼模型参数、Agent 框架、推理能力和算力规模时,一个 17 岁印度高中生却用一种近乎恶作剧的方式,创造了 2026 年最幽默的一个产品。

AI 正在学着操作电脑。由清华大学计算机系博士团队创立的非十科技,最近发布了一款桌面 Agent 产品 ———Agivar。与多数产品试图优化 Prompt 不同,它选择从另一个方向切入:让 AI 主动学习用户的工作流程。

AlphaGo是最早的AI agent例子之一。我们需要把这种AlphaGo技术更广泛地用于行政工作、头脑风暴和日常事务,帮助人们处理那些不想花时间完成的任务,从而释放出更多时间,投入更具创造性的工作。
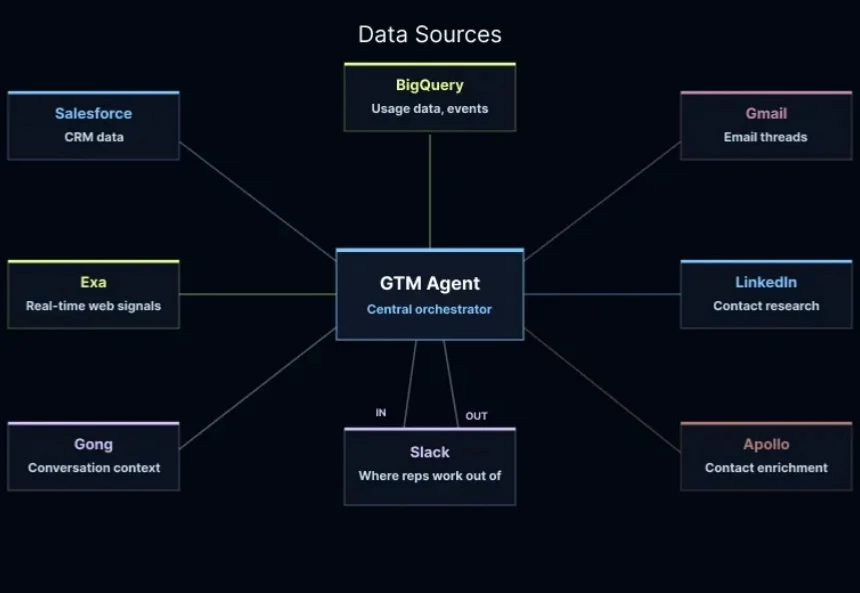
你有没有想过,销售这件事可能会被彻底重新定义?不是那种换个 CRM 系统或者学几个销售话术的小改进,而是从根本上改变销售人员的日常工作方式。

Agent + 无限画布带来的想象力。
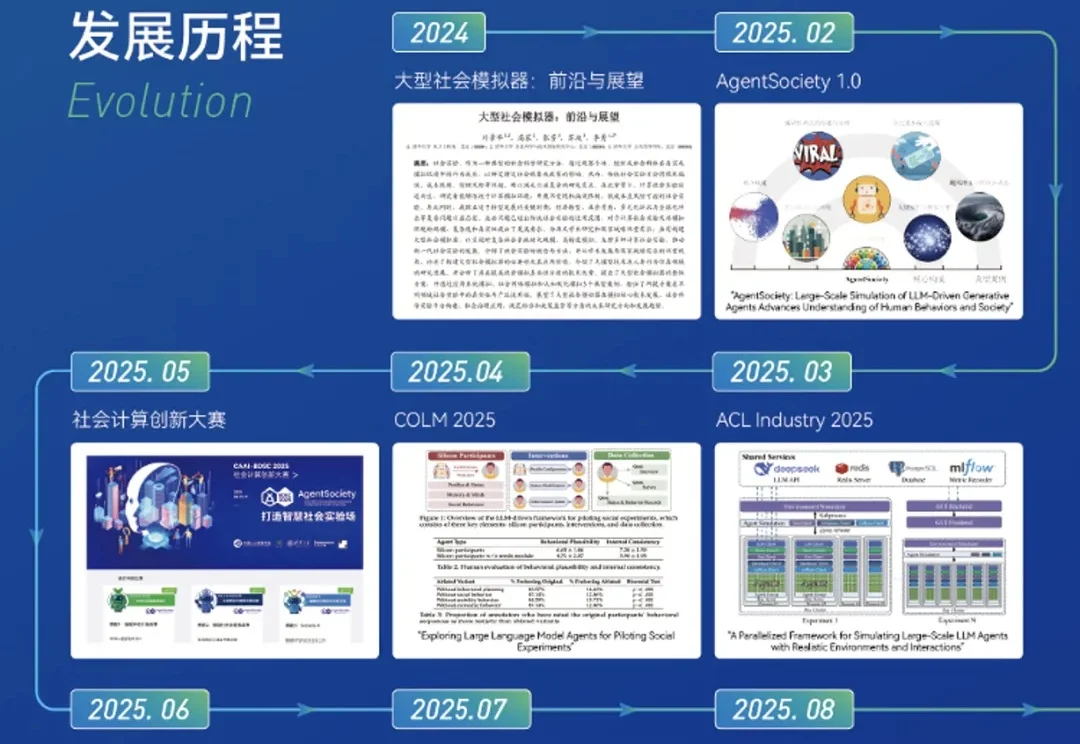
在《三体》式的科幻想象中,文明可以被遥远地观察,社会可以被冷静地记录,人类行为仿佛成为一个可被推演的复杂系统。
Anthropic 最近推出了 Claude Design,是我除了编程之外用得最多的 Agent,也推荐过很多次。效果真的好:你用一句话描述想要的 App,它直接给你生成一个可交互的原型,点哪哪都有反应,不仔细看还以为在操作真实的 App。