告别「解码器饥饿」!中国科学院NeurIPS推SpaceServe,高并发克星
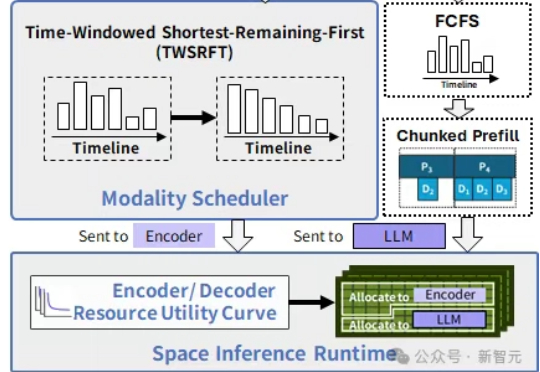
告别「解码器饥饿」!中国科学院NeurIPS推SpaceServe,高并发克星在中国科学院计算技术研究所入选NeurIPS 2025的新论文中,提出了SpaceServe的突破性架构,首次将LLM推理中的P/D分离扩展至多模态场景,通过EPD三阶解耦与「空分复用」,系统性地解决了MLLM推理中的行头阻塞难题。
来自主题: AI技术研报
9027 点击 2025-10-13 16:08
 搜索
搜索
在中国科学院计算技术研究所入选NeurIPS 2025的新论文中,提出了SpaceServe的突破性架构,首次将LLM推理中的P/D分离扩展至多模态场景,通过EPD三阶解耦与「空分复用」,系统性地解决了MLLM推理中的行头阻塞难题。
近年来,NeRF、SDF 与 3D Gaussian Splatting 等方法大放异彩,让 AI 能从图像中恢复出三维世界。但随着相关技术路线的发展与完善,瓶颈问题也随之浮现:
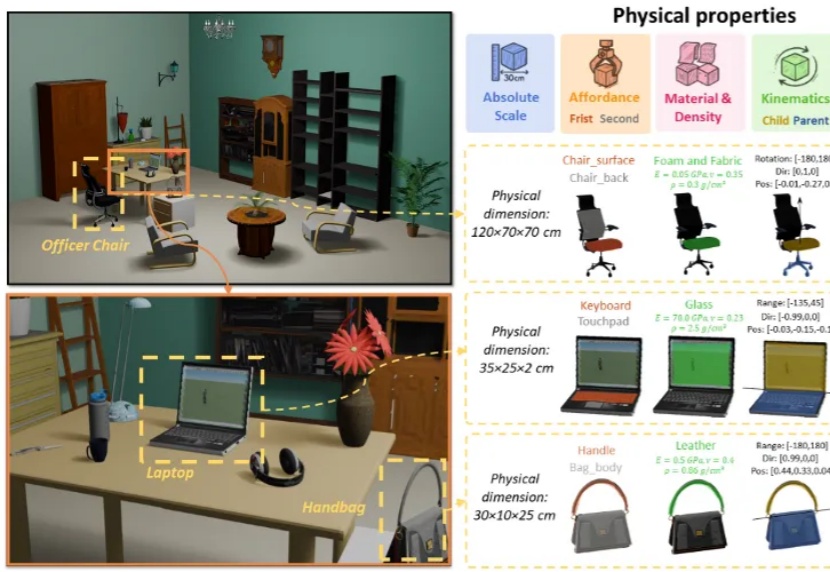
3D 生成正从纯虚拟走向物理真实,现有的 3D 生成方法主要侧重于几何结构与纹理信息,而忽略了基于物理属性的建模。
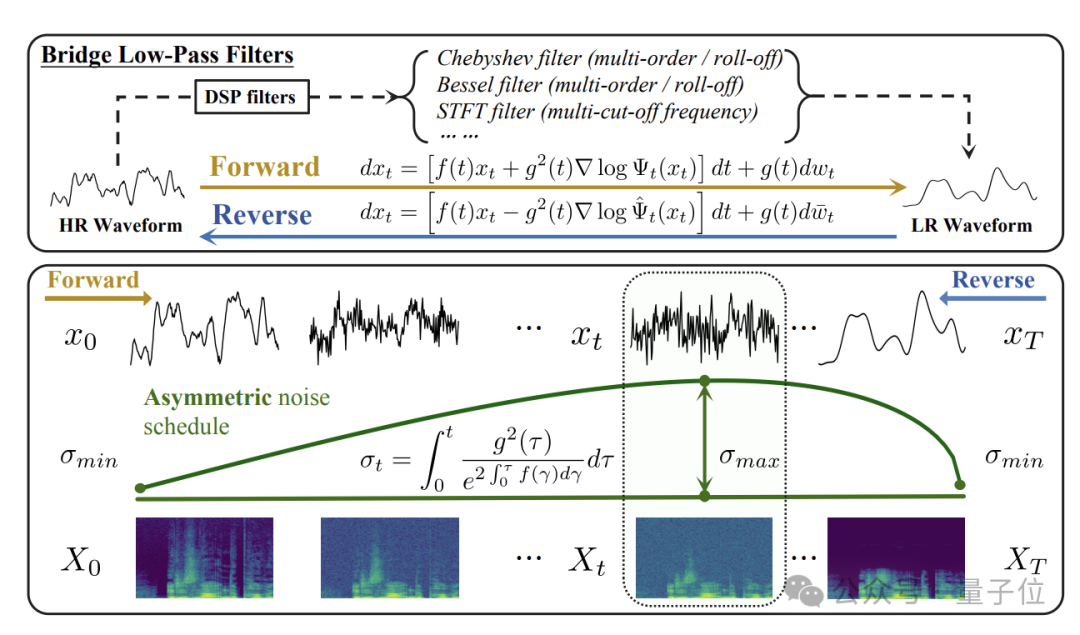
在这一背景下,清华大学与生数科技(Shengshu AI)团队围绕桥类生成模型与音频超分任务展开系统研究,先后在语音领域顶级会议ICASSP 2025和机器学习顶级会议NeurIPS 2025发表了两项连续成果:
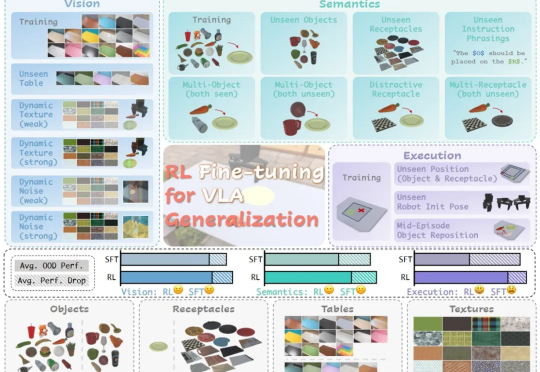
在具身智能领域,视觉 - 语言 - 动作(VLA)大模型正展现出巨大潜力,但仍面临一个关键挑战:当前主流的有监督微调(SFT)训练方式,往往让模型在遇到新环境或任务时容易出错,难以真正做到类人般的泛化
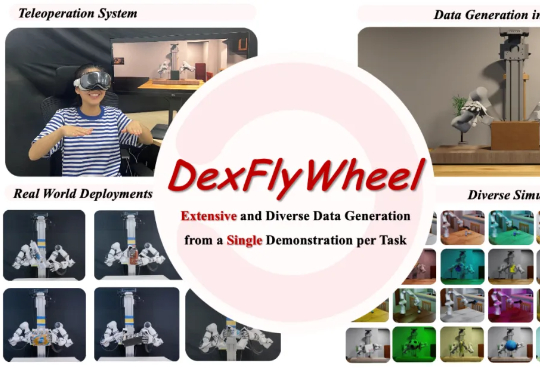
近期,北京大学、哈尔滨工业大学联合 PsiBot 灵初智能提出首个自我增强的灵巧操作数据生成框架 ——DexFlyWheel。该框架仅需单条演示即可启动任务,自动生成多样化的灵巧操作数据,旨在缓解灵巧手领域长期存在的数据稀缺问题。目前已被 NeurIPS 2025 接受为 Spotlight(入选率约 3.2%)

面向自动驾驶的多模态大模型在 “推理链” 上多以文字或符号为中介,易造成空间 - 时间关系模糊与细粒度信息丢失。FSDrive(FutureSightDrive)提出 “时空视觉 CoT”(Spatio-Temporal Chain-of-Thought),让模型直接 “以图思考”,用统一的未来图像帧作为中间推理步骤,联合未来场景与感知结果进行可视化推理。

大模型最让人头疼的毛病,就是一本正经地「瞎编」。过去,只能靠检索补丁或额外训练来修。可在NeurIPS 2024 上,谷歌抛出的新方法SLED却告诉我们:模型其实知道,只是最后一步忘了。如果把每一层的「声音」都纳入考量,它就能从幻觉中被拉回到事实。
Anthropic宣布任命前Stripe CTO Rahul Patil为新任首席技术官,此次换帅旨在强化Anthropic的AI基础设施,以应对Claude产品快速增长带来的算力和能耗压力。同时,也是为了面对OpenAI和Meta数千亿美元级的基础设施投入而进行的一次战略调整。

本周,我们邀请 3D 大模型公司 VAST 的创始人和 CEO 宋亚宸(Simon),和我们聊聊 VAST 最新 3D 生成大模型 Tripo 3.0 背后的故事。这位 97 年的创业者短期内连续融资三轮、每轮数千万美金,积攒了足够的子弹,在闷头苦干一年后,Simon 今年首次上播客,和我们探讨了几个关键的战略问题: