
牛津博士后跨界具身智能,「智子力控」获数千万元种子轮融资
牛津博士后跨界具身智能,「智子力控」获数千万元种子轮融资机器人力学感知,由电学迈入光学时代。
来自主题: AI资讯
9163 点击 2025-11-11 15:34
 搜索
搜索
机器人力学感知,由电学迈入光学时代。
做灵巧手如果不会用工具,跟咸鱼(夹爪)有什么区别?

还得是大学生会玩啊(doge)! 网上正高速冲浪中,结果意外发现:有男大竟找了个机器人队友?而且机器人还相当黏人(bushi~ 白天超市打工它要跟着,一看东西装好就立马乐颠颠帮忙拉小推车,上楼下楼忙个不停:

北京大学,银河通用,阿德莱德大学,浙江大学等机构合作,探究如何构建具身导航的基座模型(Embodied Navigation Foundation Model)提出了NavFoM,一个跨任务和跨载体的导航大模型。实现具身导航从“专用”到“通用”的技术跃进

智源研究院(BAAI)、Spin Matrix、乐聚机器人与新加坡南洋理工大学等联合提出了一个全新的终身记忆系统——RoboBrain-Memory。RoboBrain-Memory是全球范围内首个专为全双工、全模态模型设计的终身记忆系统,旨在解决具身智能体在真实世界的复杂交互问题,不仅支持实时音视频中多用户身份识别与关系理解,还能动态维护个体档案与社会关系图谱,从而实现类人的长期个性化交互。
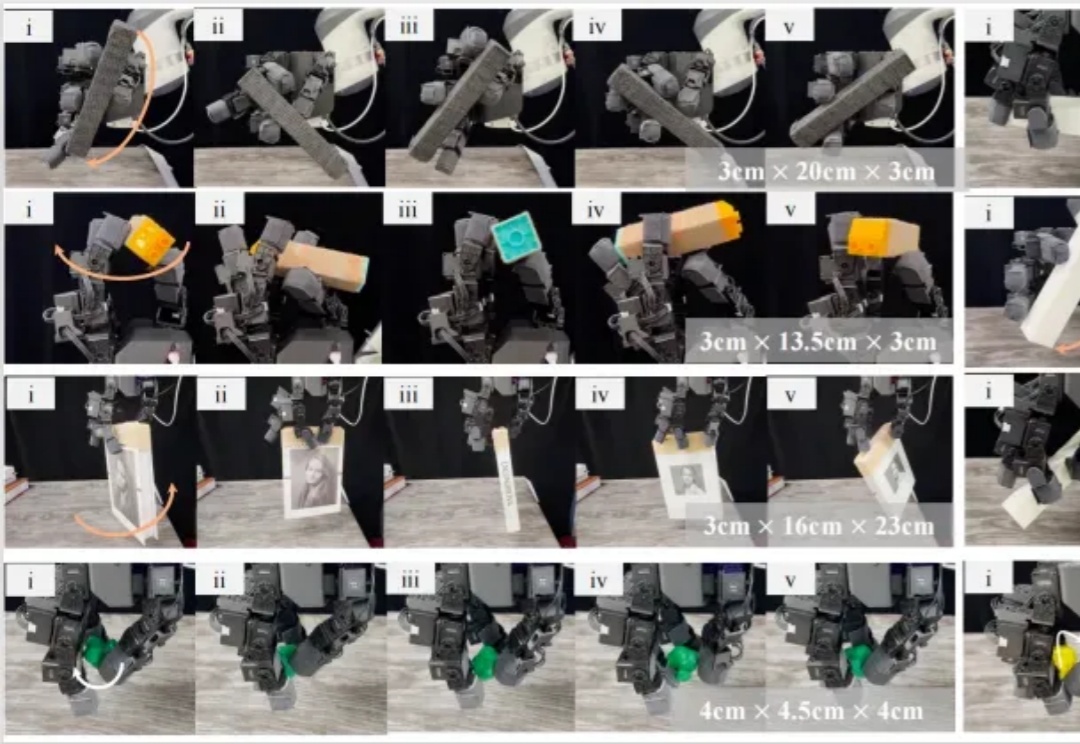
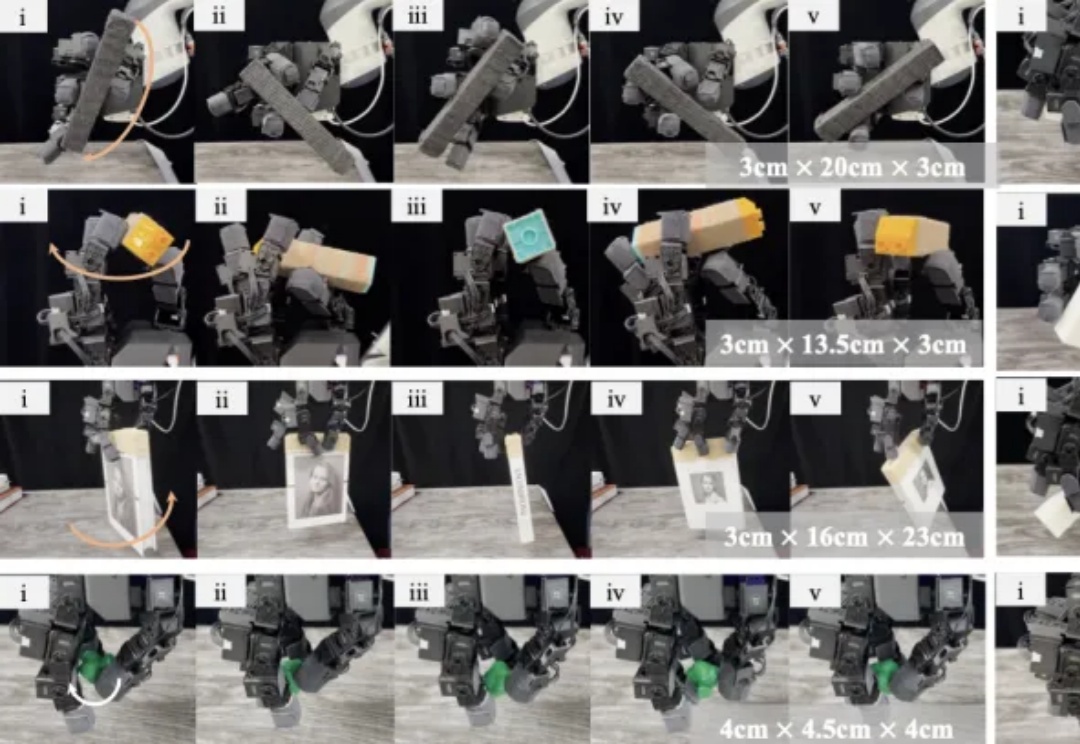
机器人使用灵巧手帮人类在工厂里拧螺丝,在家里切菜做饭的一天何时可以到来?为了实现这一愿景,旨在解决灵巧操作技能 sim-to-real 难题的 DexNDM 应运而生。

1万伏的高压配网线路上,一台亮黄色的具身智能机器人正在替人类干活。
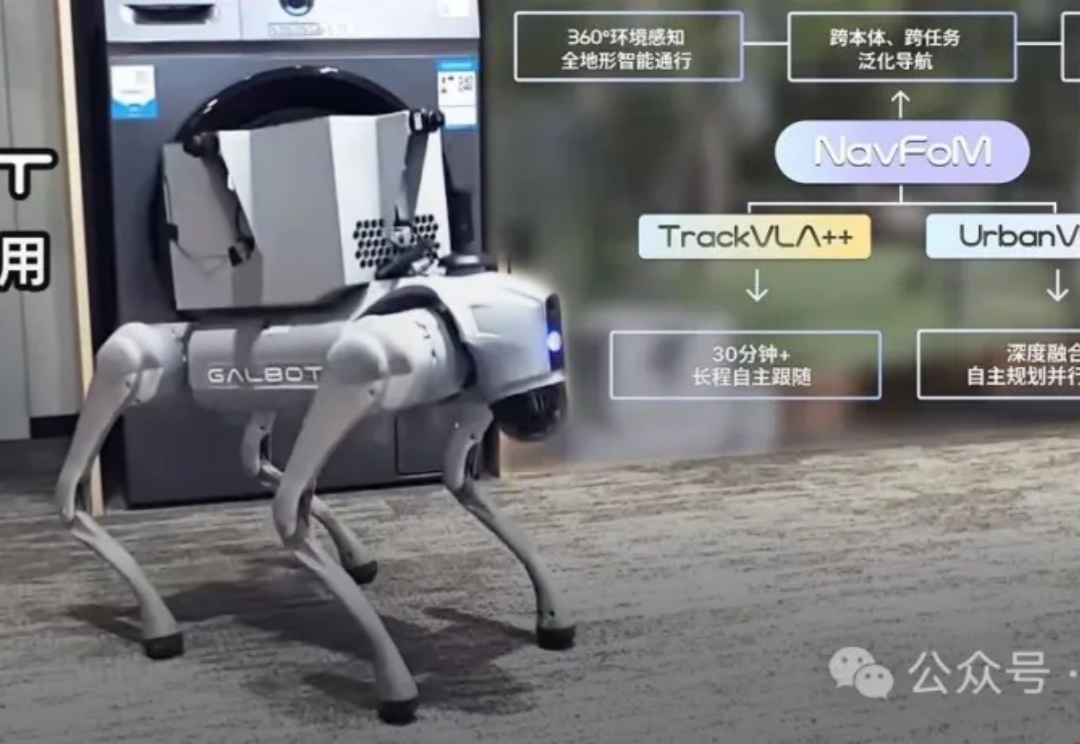
银河通用联合多所大学发布了全球首个跨本体全域环视导航基座大模型NavFoM,让机器人能自己找路,而不再依赖遥控,从而推动具身智能向规模化商业落地演进。
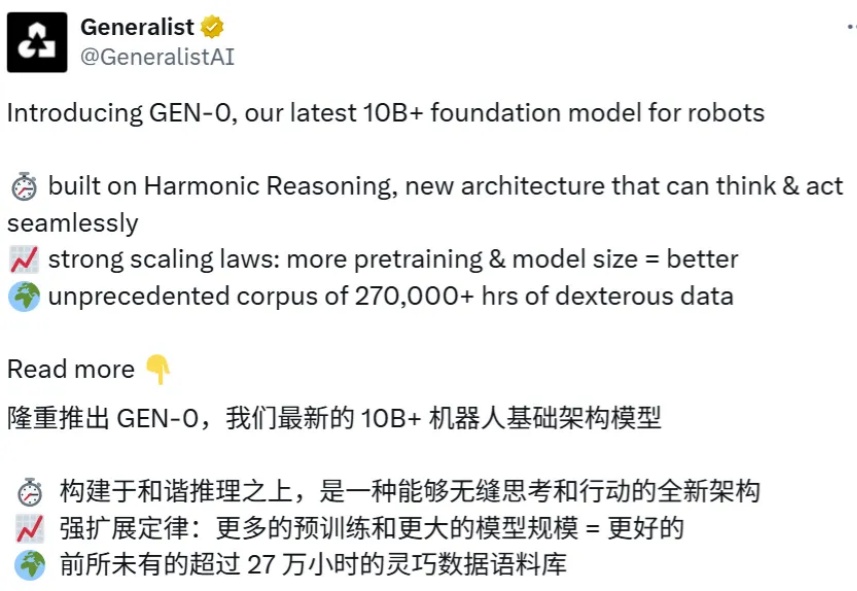
当前机器人领域,基础模型主要基于「视觉-语言预训练」,这样可将现有大型多模态模型的语义泛化优势迁移过来。但是,机器人的智能确实能随着算力和数据的增加而持续提升吗?我们能预测这种提升吗?
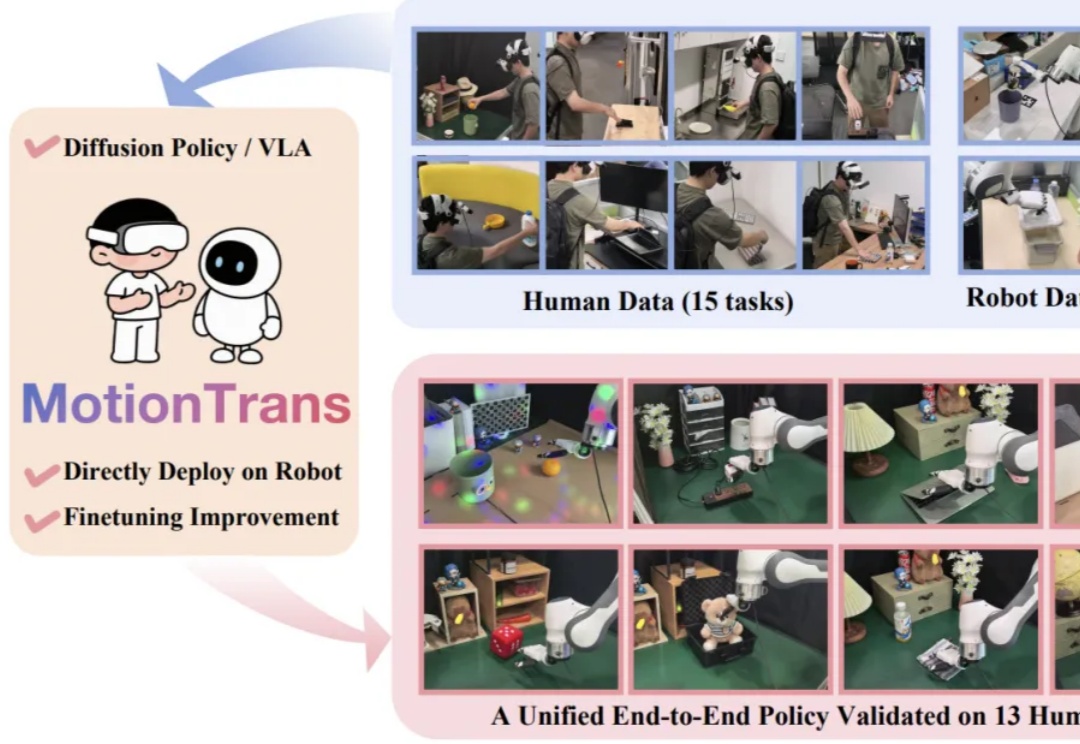
近期,Google DeepMind 发布新一代具身大模型 Gemini Robotics 1.5,其核心亮点之一便是被称为 Motion Transfer Mechanism(MT)的端到端动作迁移算法 —— 无需重新训练,即可把不同形态机器人的技能「搬」到自己身上。不过,官方技术报告对此仅一笔带过,细节成谜。