Midoo.AI 发布:AI Agent 能否破解教育行业千亿美金的「无解方程」?
Midoo.AI 发布:AI Agent 能否破解教育行业千亿美金的「无解方程」?用 AI 学语言,正成为越来越多人的选择。我们习惯于在手机里下一个 Duolingo 或 Babbel,利用碎片时间打卡闯关,仿佛离「掌握一门外语」的目标又近了一步。
来自主题: AI资讯
8485 点击 2025-09-04 12:22
 搜索
搜索
用 AI 学语言,正成为越来越多人的选择。我们习惯于在手机里下一个 Duolingo 或 Babbel,利用碎片时间打卡闯关,仿佛离「掌握一门外语」的目标又近了一步。
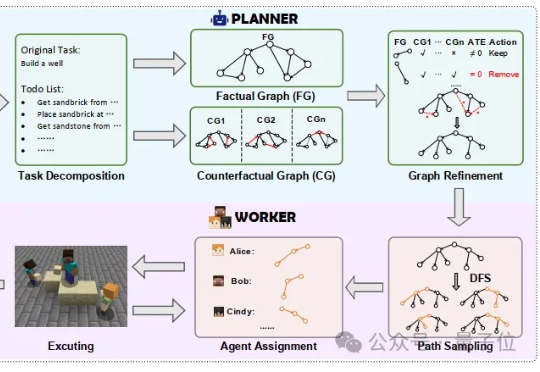
在长周期、多步骤的协作任务中,传统单智能体往往面临着任务成功率随步骤长度快速衰减,错误级联导致容错率极低等问题。

还有不到两天,就是我国庆祝抗战和世界反法西斯战争胜利 80 周年的大阅兵了。

智能体开发者的生存之道,是中国AI产业最接地气的底色。
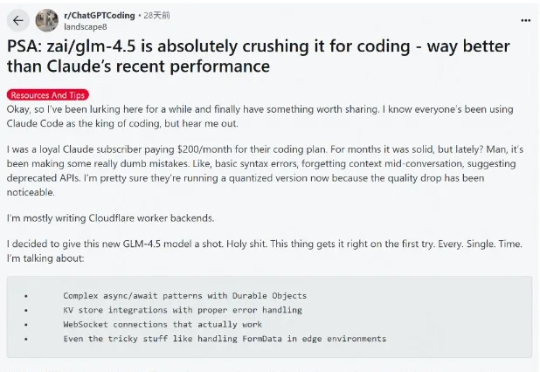
这段时间 AI 编程的热度完全没退,一个原因是国内接连推出开源了不少针对编程优化的大模型,主打长上下文、Agent 智能体、工具调用,几乎成了标配,成了 Claude Code 的国产替代,比如 GLM-4.5、DeepSeek V3.1、Kimi K2。
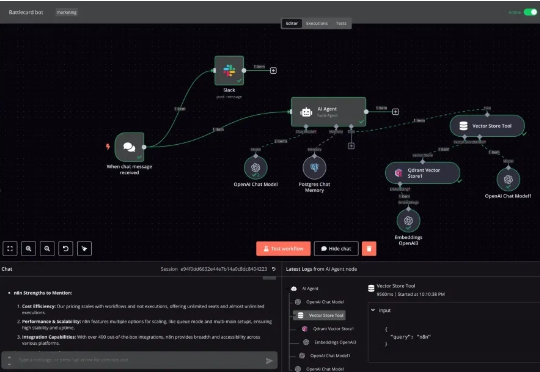
随着垂直领域 agent 的兴起,市面上的应用越来越多,用户不可避免地需要一个编排工具(orchestration tool)来将这些分散的应用串联起来,或者需要某种横向工具(horizontal tool)来统一构建 agent。而 n8n 正是这一生态位中的佼佼者,它正从一个工作流自动化工具,升级为 AI 应用的编排层。
近期,AI营销公司橙果视界(PhotoG母公司)宣布完成数千万元新一轮融资,由云天使基金领投,力合创投和金沙江联合资本跟投。本轮融资将用于进一步扩大行业数据规模,推进垂直行业后训练模型迭代,进一步加快全链路营销智能体在多行业的业务落地,持续探索能感知、决策、创造并执行的商业大脑。
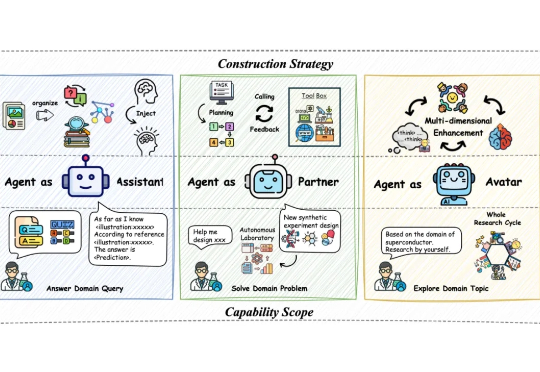
当前基于大语言模型(LLM)的智能体构建通过推动自主科学研究推动 AI4S 迅猛发展,催生一系列科研智能体的构建与应用。然而人工智能与自然科学研究之间认知论与方法论的偏差,对科研智能体系统的设计、训练以及验证产生着较大阻碍。
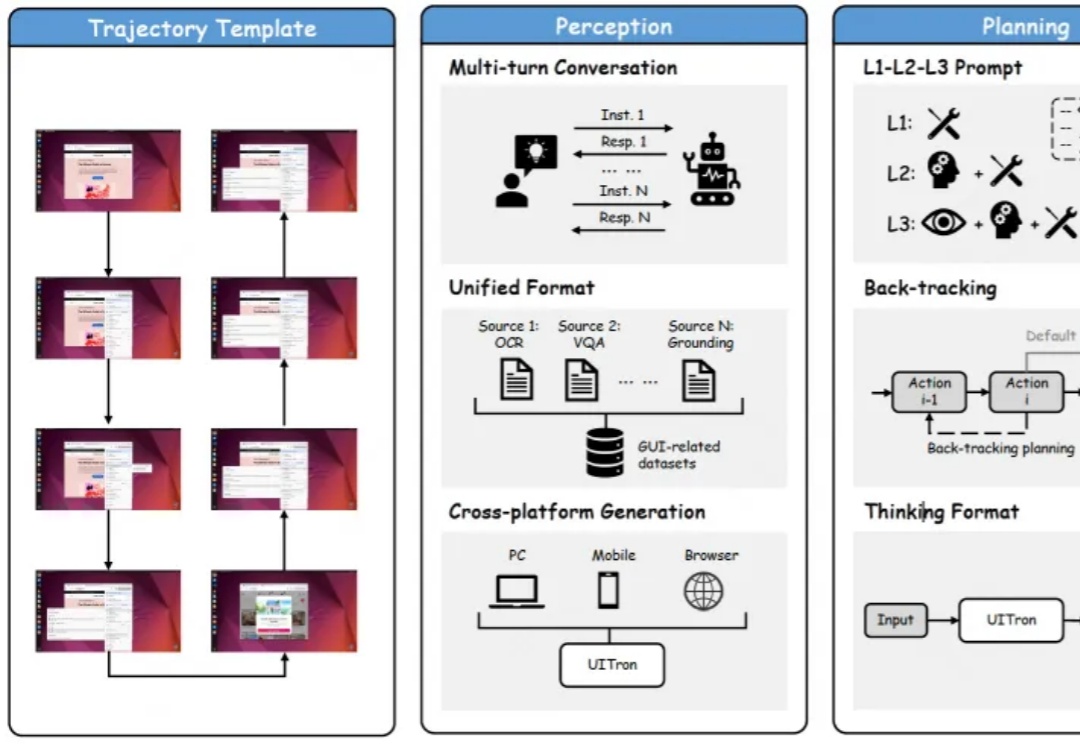
最新开源多模态智能体,能自动操作手机、电脑、浏览器的那种!开源评测榜单和中文场景交互成绩全面提升。
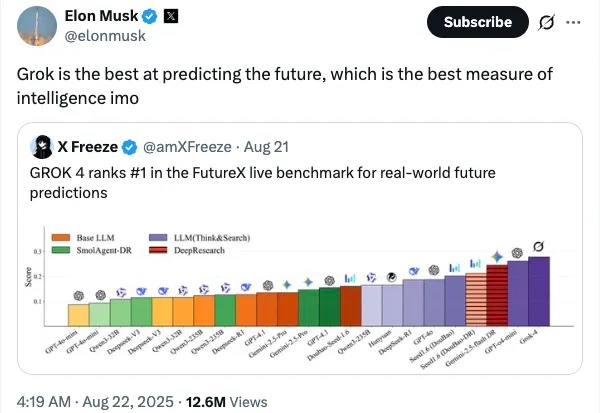
你有没有想过,AI 不仅能记住过去的一切,还能预见未知的未来?