

1米3宇树G1完美上篮!港科大解锁全球首个真实篮球机器人Demo
1米3宇树G1完美上篮!港科大解锁全球首个真实篮球机器人Demo1米3的机器人小土豆,三步上篮也可以如此丝滑。
来自主题: AI技术研报
10424 点击 2025-11-25 16:33
1米3的机器人小土豆,三步上篮也可以如此丝滑。

具身智能要想往大规模应用走,像英特尔这样的头部芯片公司必须突破算力架构。

真·乘胜追击。
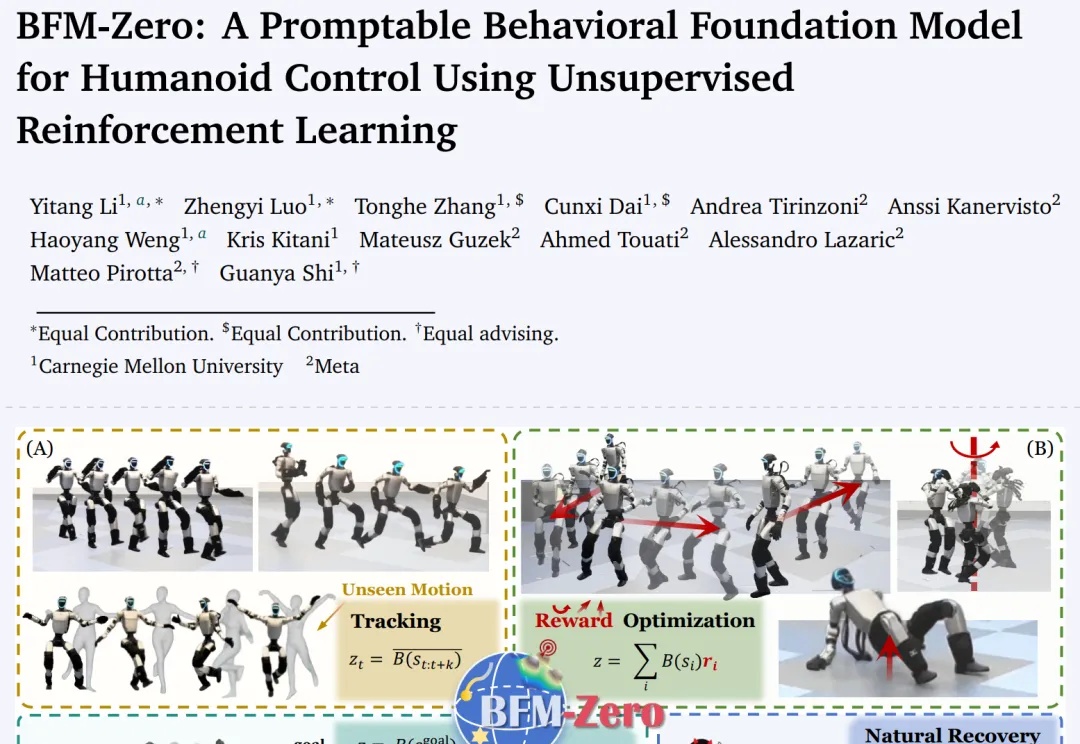
CMU×Meta 联手,姚班李忆唐最新论文成果。
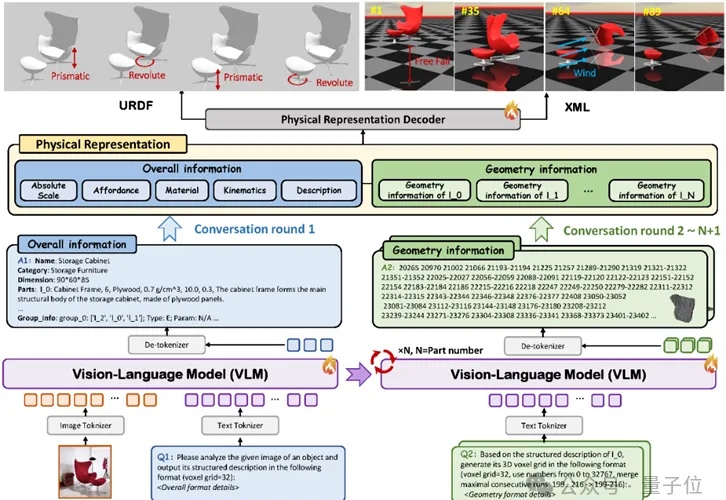
一张照片,就能生成可直接用于仿真的3D资产。

昨天,具身智能的圈子“炸”了。不是因为某家公司发布了新产品,而是因为一场“具身武林大会”—— 2025智源具身智能Open Day。现场有多火爆?这么说吧,银河通用、智元、星海图、自变量、原力灵机、加速进化、北京人形、星源智、优必选、

如果说大多数初创公司是败在产品发布后的沉寂和无人问津,那么首形科技显然在这一阶段活了下来。

斯坦福明星华人博士生的创业机器人,终于正式亮相!

在腾讯四年,朱庆旭曾将多种训练数据喂给具身模型,最终他得出结论:“基于遥操作数据训练的主流方案,有着原理性缺陷。”

本周,美国具身智能创业公司 Physical Intelligence(简称 PI 或 π)发布了旗下的最新机器人基础模型 π*0.6。PI 是一家总部位于旧金山的机器人与 AI 创业公司,其使命是将通用人工智能从数字世界带入物理世界:他们的首个机器人通用基础模型名为 π₀,让同一套软件控制多种物理平台执行各类任务。