
无需再训练即可增强性能!港大团队提出GPC框架,实现机器人「策略组合」
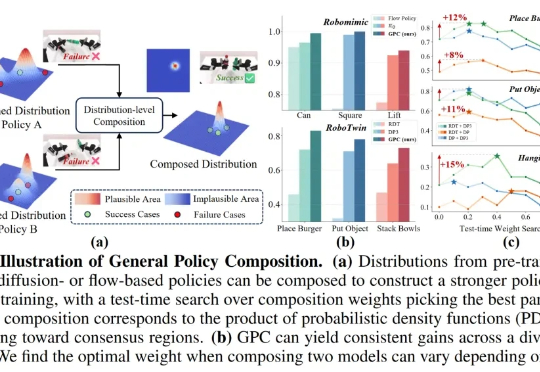
无需再训练即可增强性能!港大团队提出GPC框架,实现机器人「策略组合」在机器人学习领域,提升基于生成式模型的控制策略(Policy)的性能通常意味着投入巨额成本进行额外的数据采集和模型训练,这极大地限制了机器人能力的快速迭代与升级。面对模型性能的瓶颈,如何在不增加训练负担的情况下,进一步挖掘并增强现有策略的潜力?
来自主题: AI技术研报
7590 点击 2025-10-20 14:52
在机器人学习领域,提升基于生成式模型的控制策略(Policy)的性能通常意味着投入巨额成本进行额外的数据采集和模型训练,这极大地限制了机器人能力的快速迭代与升级。面对模型性能的瓶颈,如何在不增加训练负担的情况下,进一步挖掘并增强现有策略的潜力?
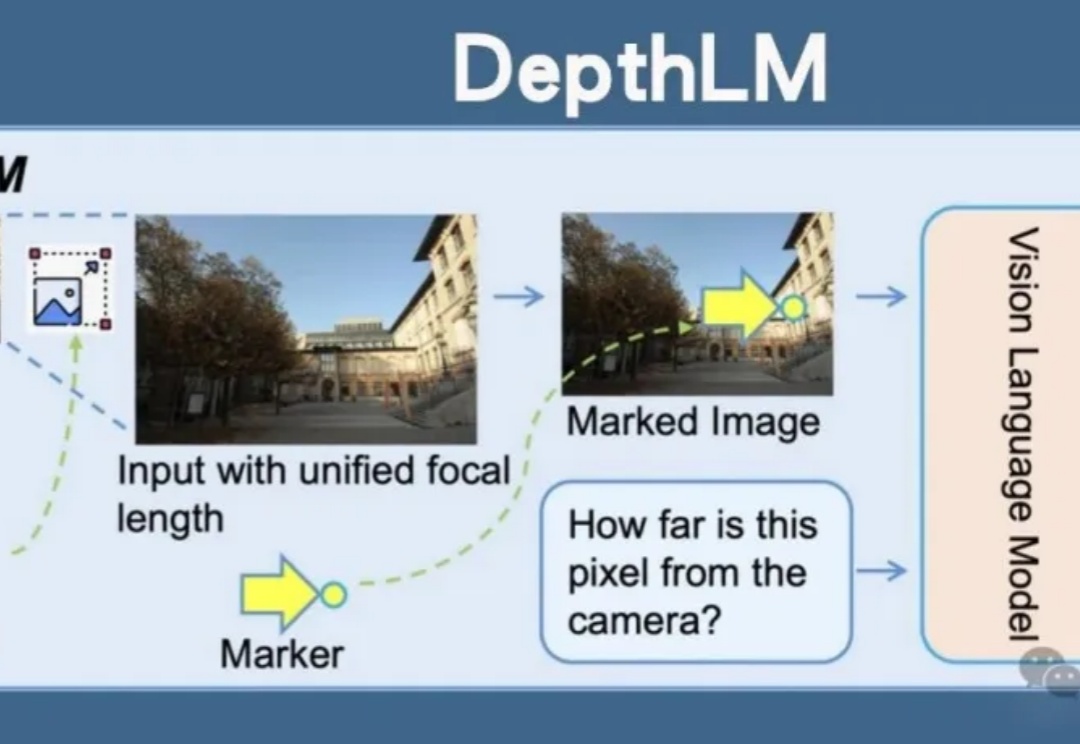
Meta开源DepthLM,首证视觉语言模型无需改架构即可媲美纯视觉模型的3D理解能力。通过视觉提示、稀疏标注等创新策略,DepthLM精准完成像素级深度估计等任务,解锁VLM多任务处理潜力,为自动驾驶、机器人等领域带来巨大前景。

400元遥操95%机械臂,上海交大推出开源项目U-Arm! 目前它已在XArm6、Dobot CR5、ARX R5等多种机械臂真机上进行了遥操作的验证。
在「具身智能」与「世界模型」成为新一轮 AI 竞赛关键词的当下,来自北京人形机器人创新中心、北京大学多媒体信息处理国家重点实验室、香港科技大学的中国团队开源了全新的世界模型架构。
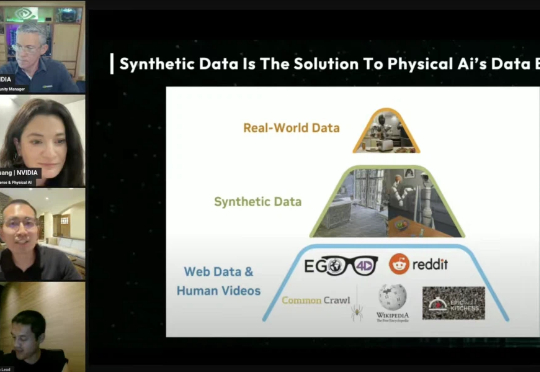
黄仁勋大家都见得多了,但你见过他女儿讲具身智能吗?这不,黄仁勋女儿Madison Huang首次公开亮相直播访谈节目,作为英伟达Omniverse与物理AI高级总监,与光轮智能CEO谢晨,以及光轮智能增长负责人穆斯塔法一起,对“如何缩小机器人在虚拟与现实之间的差距”展开深刻探讨。
在机器人与自动驾驶领域,由强化学习训练的控制策略普遍存在控制动作不平滑的问题。这种高频的动作震荡不仅会加剧硬件磨损、导致系统过热,更会在真实世界的复杂扰动下引发系统失稳,是阻碍强化学习走向现实应用的关键挑战。
国内首个少样本通用具身操作基础模型发布,跨越视觉语言与机器人操作的鸿沟。

就在今天,“一家明星具身智能公司原地解散”的传闻在圈内迅速传开,而且因为公司成立时间很短,甚至都不涉及员工赔偿。就在一个多月前,这家公司还高调公开了新融资,以及AI技术大牛加盟作为联合创始人及CTO。
近日,RoboChallenge 重磅推出!这是全球首个大规模、多任务的在真实物理环境中由真实机器人执行操作任务的基准测试。

10月16日消息,OpenAI首席执行官山姆·奥特曼于美国当地时间周三表示,该公司并非"经选举产生的世界道德警察"。此前,他决定放宽限制,允许其聊天机器人ChatGPT生成成人内容,这一决定引发了强烈反弹。