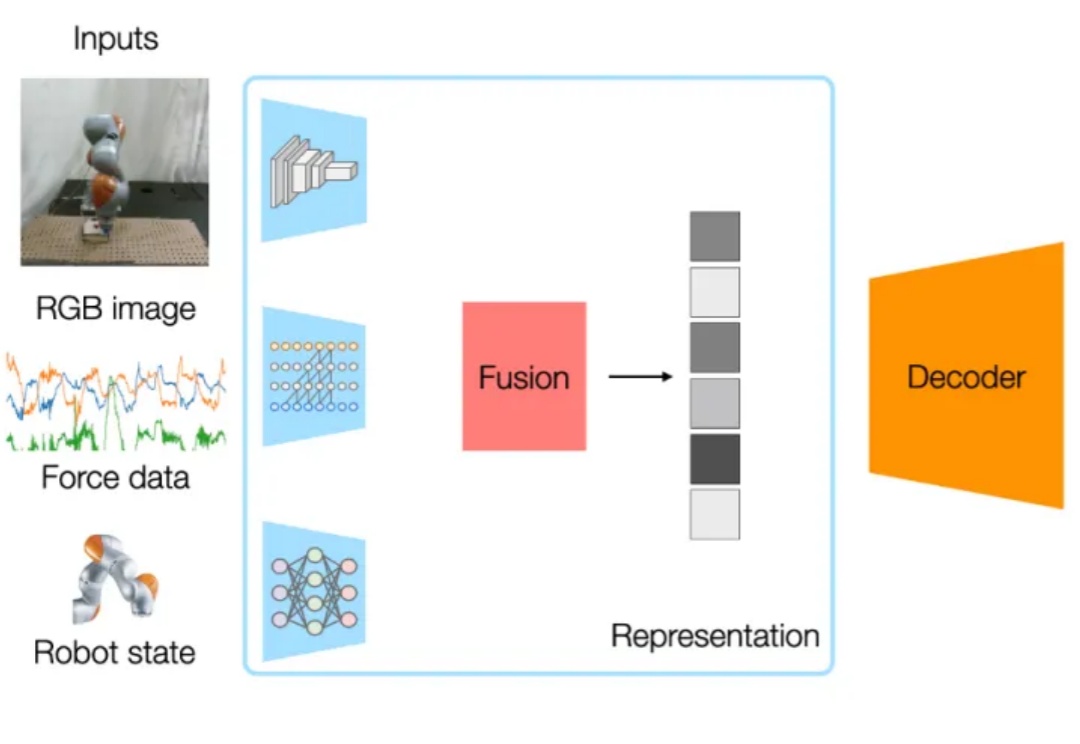
优理奇机器人完成两轮合计3亿元天使++++轮及天使+++++轮融资,“算法-硬件-场景”三位一体加速具身智能应用落地
优理奇机器人完成两轮合计3亿元天使++++轮及天使+++++轮融资,“算法-硬件-场景”三位一体加速具身智能应用落地优理奇机器人(UniX AI)近日宣布完成两轮合计3亿元天使++++轮及天使+++++轮融资,由川商基金、吴中金控、益华资本、青域基金、太浩创投等机构,以及若干上市公司及产业方参与投资,老股东赛纳资本追加投资。
来自主题: AI资讯
8505 点击 2025-12-06 11:01