

让机器人在“想象”中学习世界的模型来了!PI联创课题组&清华陈建宇团队联合出品
让机器人在“想象”中学习世界的模型来了!PI联创课题组&清华陈建宇团队联合出品这两天,Physical Intelligence(PI)联合创始人Chelsea Finn在𝕏上,对斯坦福课题组一项最新世界模型工作kuakua连续点赞。
来自主题: AI技术研报
7938 点击 2025-10-31 09:51
这两天,Physical Intelligence(PI)联合创始人Chelsea Finn在𝕏上,对斯坦福课题组一项最新世界模型工作kuakua连续点赞。
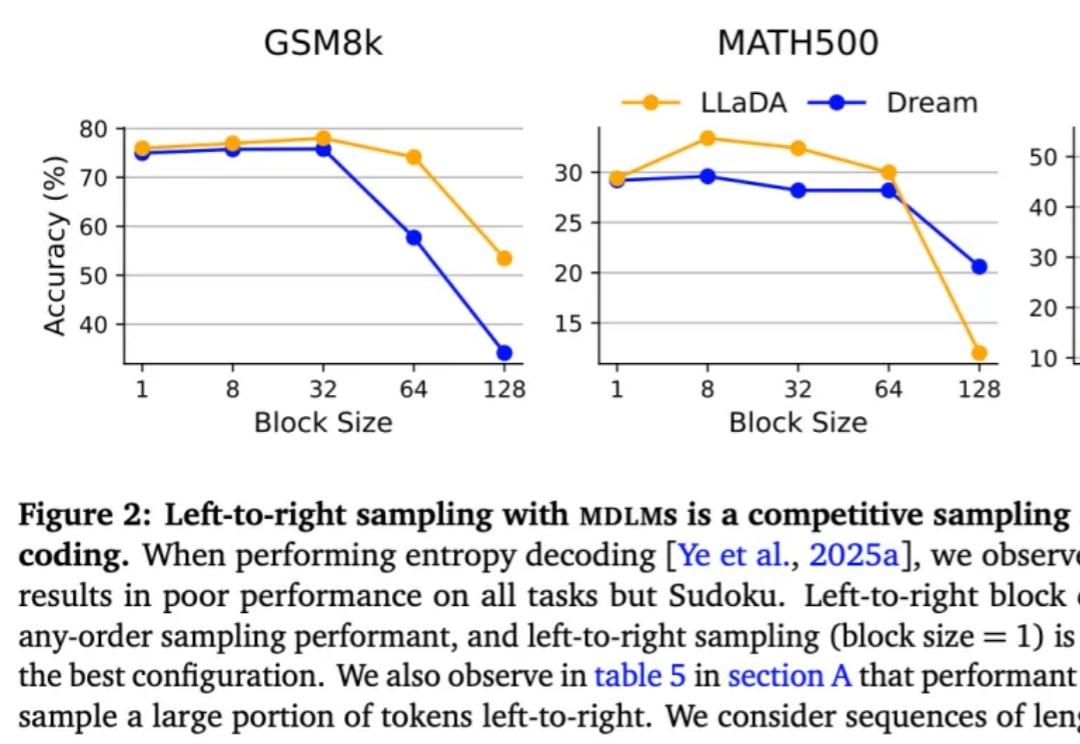
按从左到右的顺序依次生成下一个 token 真的是大模型生成方式的最优解吗?最近,越来越多的研究者对此提出质疑。其中,有些研究者已经转向一个新的方向 —— 掩码扩散语言模型(MDLM)。
蛋白质大模型的最新突破,来自中国!最近,百奥几何「悄悄地」发布了新一代全场景原子级蛋白质基础大模型GeoFlow V3,给全球同行们树了一个新榜样。当其他模型还在“卷规模”的时候,GeoFlow V3选择了一条不同的路线——首次将多步推理引入蛋白质设计,让模型具备“自我评估、自主进化”的能力。
今天,北京智源人工智能研究院(BAAI)重磅发布了其多模态系列模型的最新力作 —— 悟界・Emu3.5。这不仅仅是一次常规的模型迭代,Emu3.5 被定义为一个 “多模态世界大模型”(Multimodal World Foudation Model)。

家人们,不知道你有没有试过,在和 AI 聊天时,冷不丁地问一句: “你刚刚在想什么?”
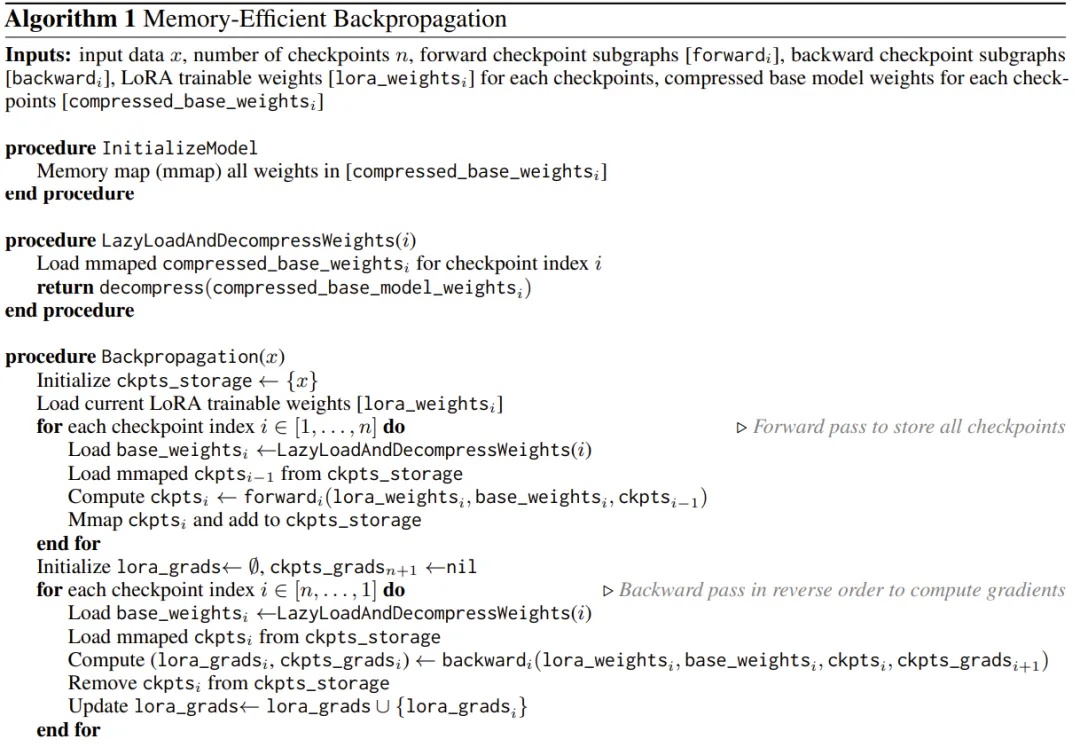
用 iPhone 本地跑大模型已经不是新鲜事了,但能不能在 iPhone 上微调模型呢?

近年来,基于扩散模型的图像生成技术发展迅猛,催生了Stable Diffusion、Midjourney等一系列强大的文生图应用。然而,当前主流的训练范式普遍依赖一个核心组件——变分自编码器(VAE),这也带来了长久以来困扰研究者们的几个问题:
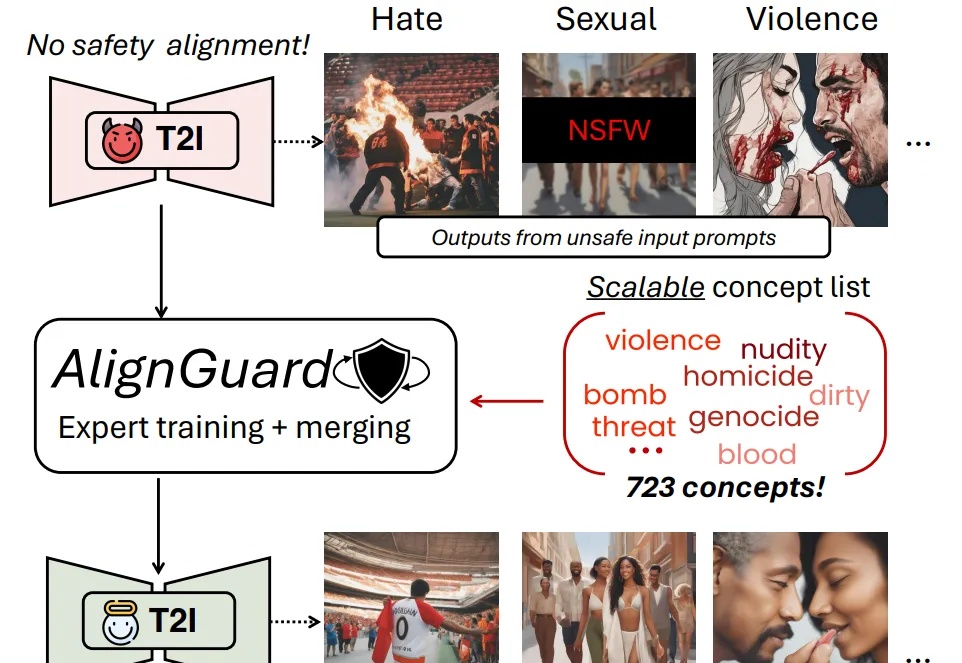
随着文图生成模型的广泛应用,模型本身有限的安全防护机制使得用户有机会无意或故意生成有害的图片内容,并且该内容有可能会被恶意使用。现有的安全措施主要依赖文本过滤或概念移除的策略,只能从文图生成模型的生成能力中移除少数几个概念。
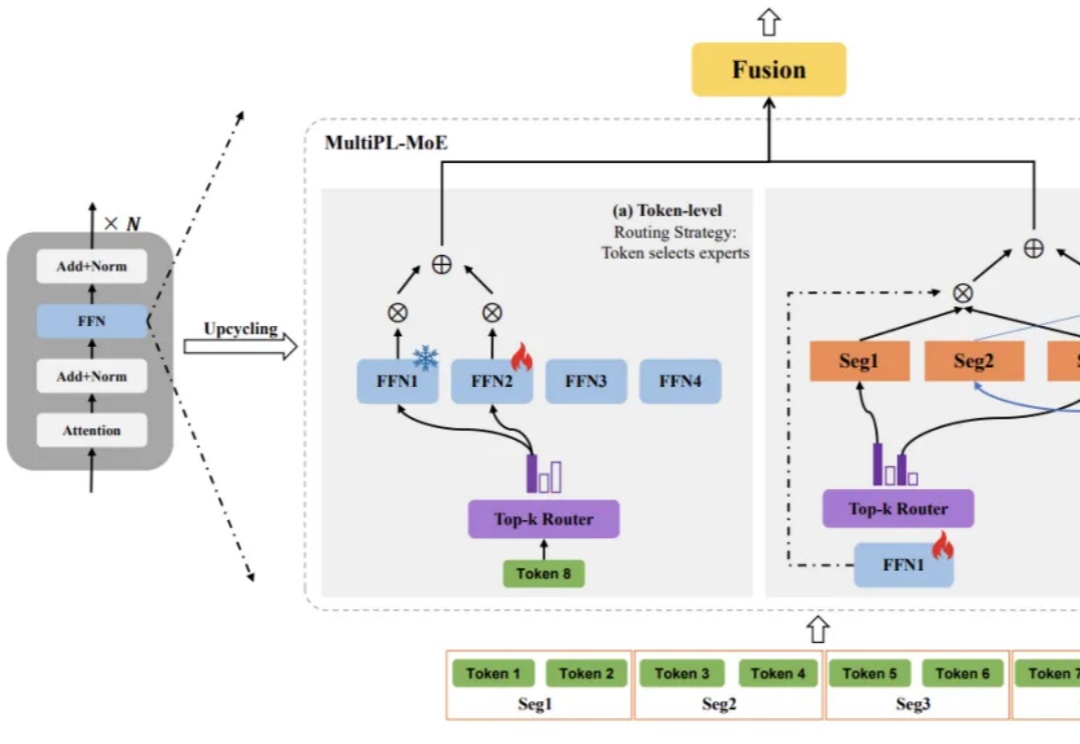
大语言模型(LLM)虽已展现出卓越的代码生成潜力,却依然面临着一道艰巨的挑战:如何在有限的计算资源约束下,同步提升对多种编程语言的理解与生成能力,同时不损害其在主流语言上的性能?

这次不仅发布自研编码模型Composer,还重构了IDE交互逻辑,可以最多8个智能体同时跑,早期测试和开发者都说Cursor 2.0真的太快了。Composer的速度是同等模型的4倍。Cursor说这是一款专门为低延迟智能编码打造的模型,大部分任务都可以在30秒以内完成。