从「说错话」到「干错事」:复旦、CityUHK、SMU、UIUC等13家机构联合发布「具身智能安全」综述
从「说错话」到「干错事」:复旦、CityUHK、SMU、UIUC等13家机构联合发布「具身智能安全」综述具身智能(Embodied AI)正在快速从实验室走向真实世界。
来自主题: AI技术研报
8993 点击 2026-05-25 14:45
 搜索
搜索
具身智能(Embodied AI)正在快速从实验室走向真实世界。
5 月 22 日,Tri Dao 在社交媒体上转发了 Han Guo 的一条推文。他还写道:「经过一些数学重写,结果发现 Transformer 的所有内容都是一系列 GEMM + epilogue(矩阵乘法加尾声)。给定一些优化的原语,LLM(以及新手)就可以为所有 Transformer 操作编写光速内核!」
当前,测试时扩展范式普遍致力于增加推理长度。然而,已有研究表明,随着推理长度的持续增长,以垂直扩展为核心的计算范式容易陷入探索僵化等问题。因此,从另一维度拓展推理的宽度显得尤为重要。K2.5、Step3-VL 和 LongCat-Flash-Thinking 等模型已在推理宽度方面开展了有益的探索。
前谷歌DeepMind研究员离职并发表长文指出AI行业当前最被低估的瓶颈。他认为,现有的基准测试和安全评估都隐含假设下一代模型只是当前模型的增强版,但如果模型跨入全新能力区间,整个评估基础设施将悄然崩溃。
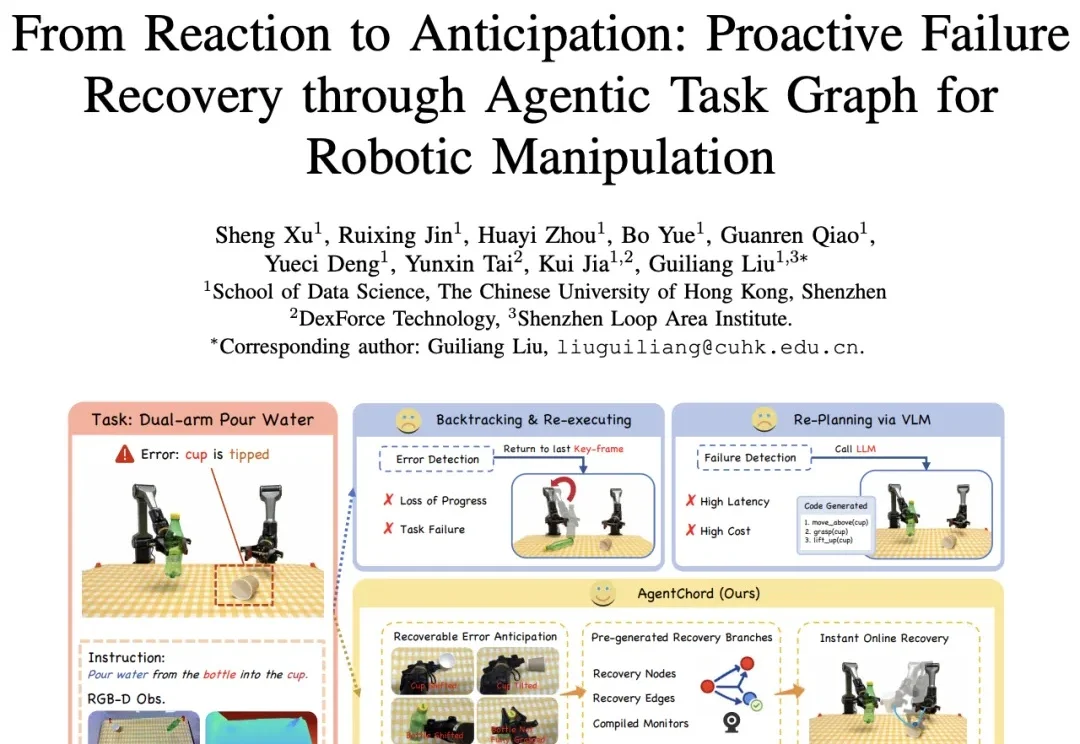
机器人操作正在从结构化工业场景走向更开放的真实环境。相比完成单个预设动作,真实任务往往包含更长的执行链条、更复杂的物体交互,以及更多不可控的外部扰动。一次抓取没有完全夹稳、目标物体被轻微碰偏、双臂交接时姿态出现偏差,都可能让后续步骤偏离原本计划。

最近,来自上海创智学院、复旦大学等机构的研究者提出了 Hallo-Live,试图正面解决这个矛盾。论文于 2026 年 4 月 26 日 发布在 arXiv。该方法将 异步双流扩散(Asynchronous Dual-Stream Diffusion) 与 人类偏好引导蒸馏(Human-Centric Preference-Guided DMD) 结合起来
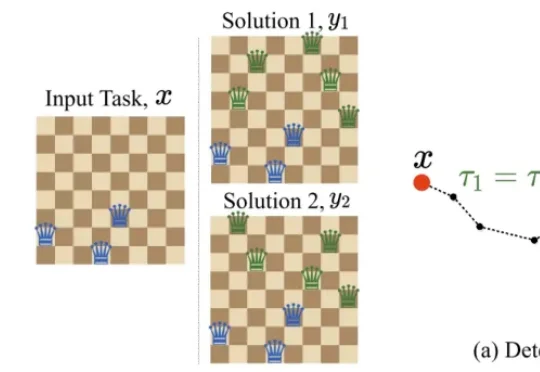
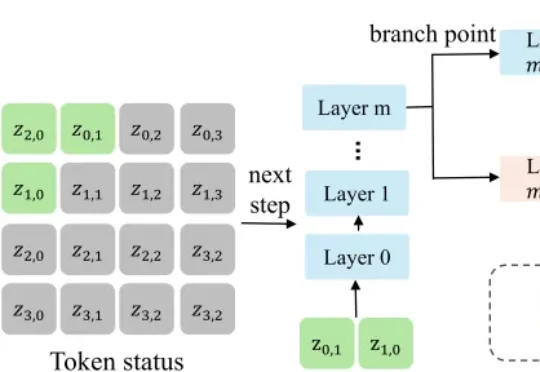
现在,图灵奖得主 Yoshua Bengio 给出了一份全新的并行方案。他们提出了 GRAM(Generative Recursive reAsoning Models,生成式递归推理模型),把确定性的递归潜在推理变成了概率性的多轨迹计算。模型在潜在空间中进行随机递归推理,每一步都可以采样不同的方向,最终形成对解空间的多路径探索。
来自浙江大学和阿德莱德大学的研究团队提出了 FlashAR—— 一个轻量级的后训练加速框架。不需要从头训练,在 Emu3.5-Image-34B 模型上,仅用原始训练数据的 0.05%(约 8 万张图片),就能将预训练好的自回归模型改造成高度并行的生成器 Emu3.5-34B-Flash,实现最高 22.9 倍的端到端加速。
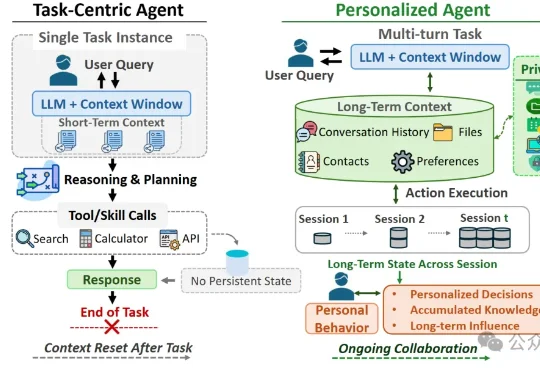
日常聊天可能在不经意间污染个性化Agent的长期记忆,使其在未来任务中偏离用户真实意图。研究人员通过ULSPB基准测试发现,即使无恶意提示,日常对话也可能改变Agent的安全边界。
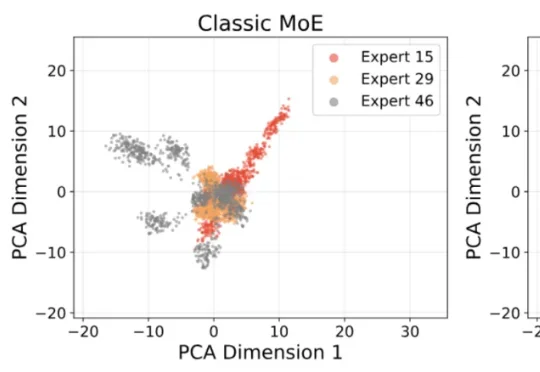
近年来,Mixture-of-Experts(MoE)已经成为大模型扩展的重要架构之一。相比稠密 Transformer,MoE 通过稀疏激活机制,在每个 token 上只调用少量专家,从而在控制计算成本的同时扩大模型容量。然而,一个长期存在的问题是:专家越多,并不意味着专家真的学得越 “专”。