谷歌掀桌:深度研究智能体进入自动驾驶时代
谷歌掀桌:深度研究智能体进入自动驾驶时代OpenAI刚用Deep Research抢了先手,谷歌直接掀桌!DeepMind祭出研究智能体双杀,Max版质量评分从66.1%暴拉到93.3%,知识工作自动化的军备竞赛正式进入贴身肉搏。
来自主题: AI资讯
8120 点击 2026-04-30 13:50
 搜索
搜索
OpenAI刚用Deep Research抢了先手,谷歌直接掀桌!DeepMind祭出研究智能体双杀,Max版质量评分从66.1%暴拉到93.3%,知识工作自动化的军备竞赛正式进入贴身肉搏。

今天,大洋彼岸,硅谷自动驾驶领域的秘密,终于有大佬站出来分享了。如果你对自动驾驶、人形机器人中炙手可热的 VLA、世界模型还有疑惑,全球“物理 AI” 领域头部的基础设施平台 Applied Intuition 两位创始人:CEOQasar Younis、CTO Peter Ludwig的分享可真的是太对口了。
从单幅图像恢复三维结构,到多视图场景建模、动态 4D 重建,再到机器人、自动驾驶、SLAM 与视频生成,如何让模型在不依赖逐场景优化的前提下,直接、高效地理解并重建三维世界,正在成为 3D 视觉领域的
4月19日,驭势科技通过港交所聆讯。吹响IPO号角,第二次。
前华为自动驾驶CTO、天才少年创办。

SLAM 在自动驾驶、机器人、AR/VR 乃至具身智能系统中都是至关重要的环节,它决定了算法能否在一个陌生环境中一边“看懂世界”,一边“知道自己在哪”。
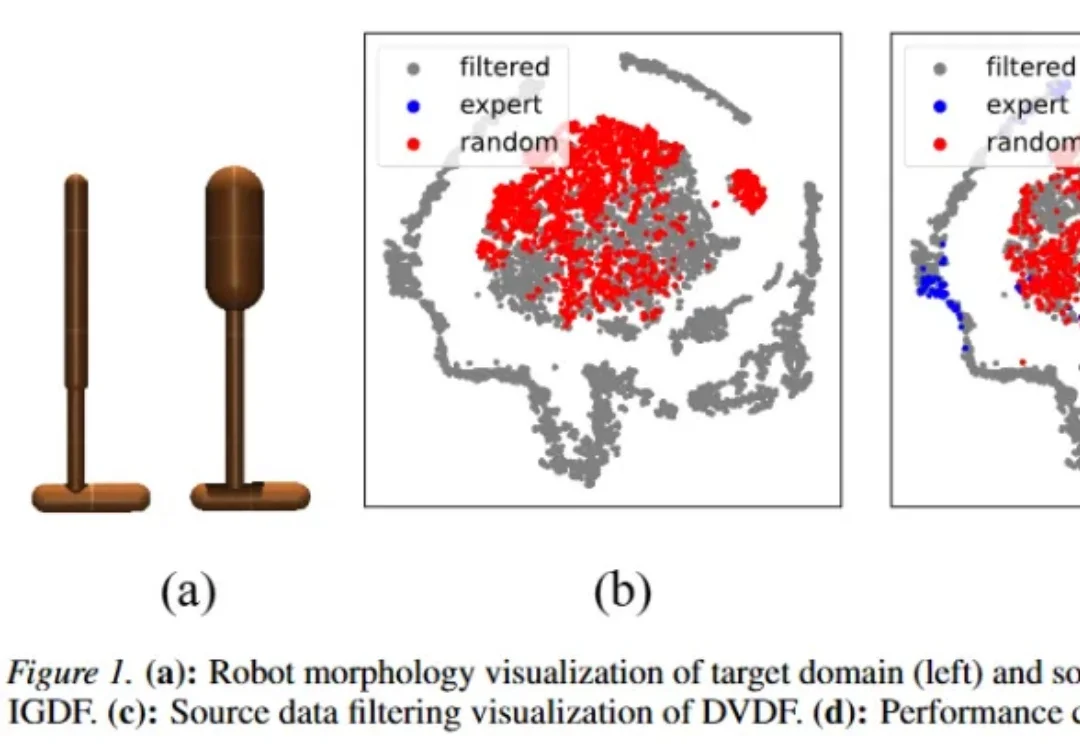
在现实世界中通过强化学习训练智能体,往往需要大量在线试错与环境探索,这不仅成本高昂,还可能带来显著安全风险:机器人可能因试错而损坏,自动驾驶的在线探索可能危及行车安全,而持续采集交互数据本身也代价巨大。
凌晨,Anthropic再次扔下一枚重磅炸弹——Claude真要起飞了!今天,Claude Code正式上线「计算机使用」,直控CLI写代码、点UI、改Bug。一键开启「自动驾驶」模式,彻底解放打工人双手。
在自动驾驶、具身智能、AR/VR应用中做3D重建,大家都想解决一个终极问题: 模型能不能像人一样,一边往前看,一边持续构建三维世界?
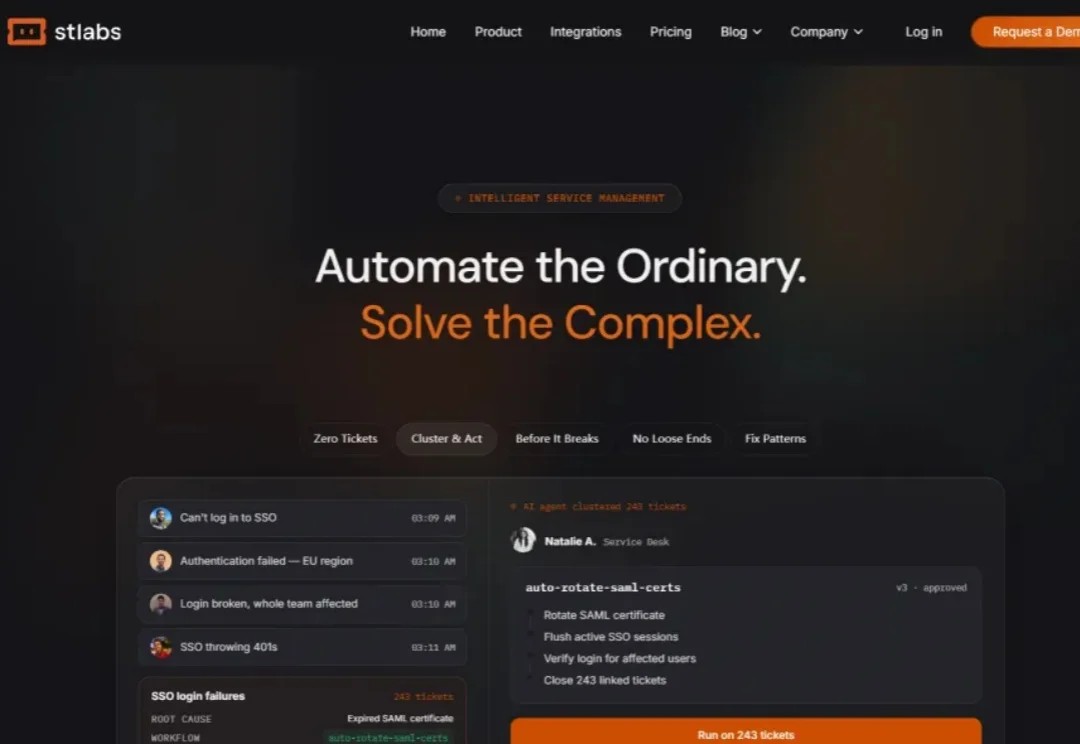
由 Datadog 前总裁阿米特·阿加瓦尔创立的 Standard Template Labs 已完成首轮 4900 万美元融资,旨在重塑大型企业内部信息技术服务的运作方式。