# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT

Petoi Bittle 是一款开源、可编程、四足仿生AI机器狗,尺寸为20cm×11cm×11cm,只有手掌大小,重量不到280g,它的肚子下可以携带450g的「货物」。Bittle 机器狗有12个舵机,组合60多套动作,可跑可跳,还可以爬上纸箱子,能在实时指令下表演更多的花样。如果摔倒了,它会自己爬起来。就连在下雨天想走,沙地上也都完全没问题。
Bittle 机器狗的嘴巴里设置了夹子,用来放置可扩展模块,比如智能相机模块、手势传感器、PIR传感器等。

🤖 Bittle 机器狗硬件设计和组装


预装版本的Bittle只需要将脖子插入身体并将膝盖弯曲成自然角度。将弯曲的舵机线从膝盖侧拉到肩膀侧,以避免在膝盖关节旋转时被挤压到。

然后,长按电池按钮2到3秒钟打开/关闭电源。拔下红外遥控器电池的绝缘片,然后您可以控制Bittle的移动。如果Bittle检测到电量低会暂停动作并哔哔叫,这时您需要用5V micro-USB线给电池充电。


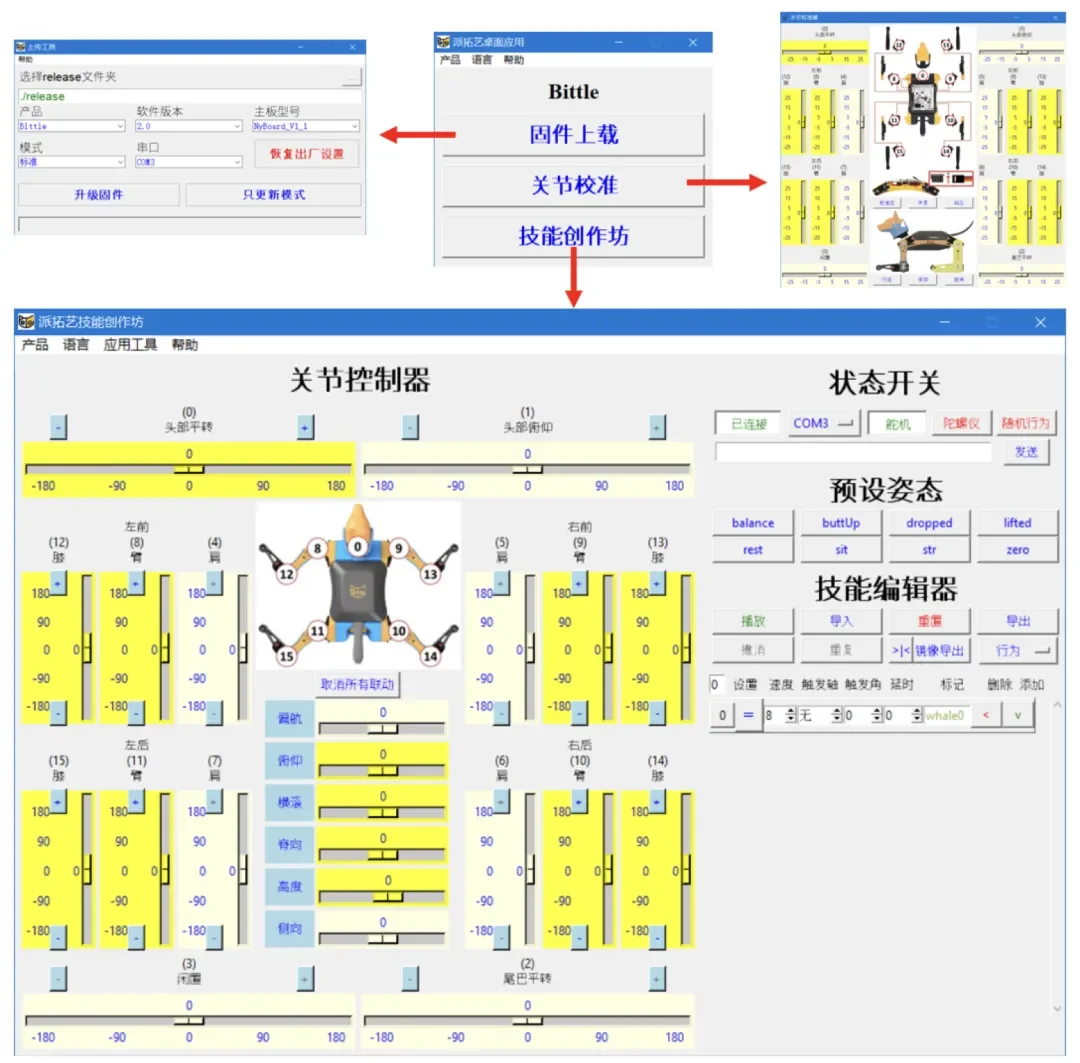
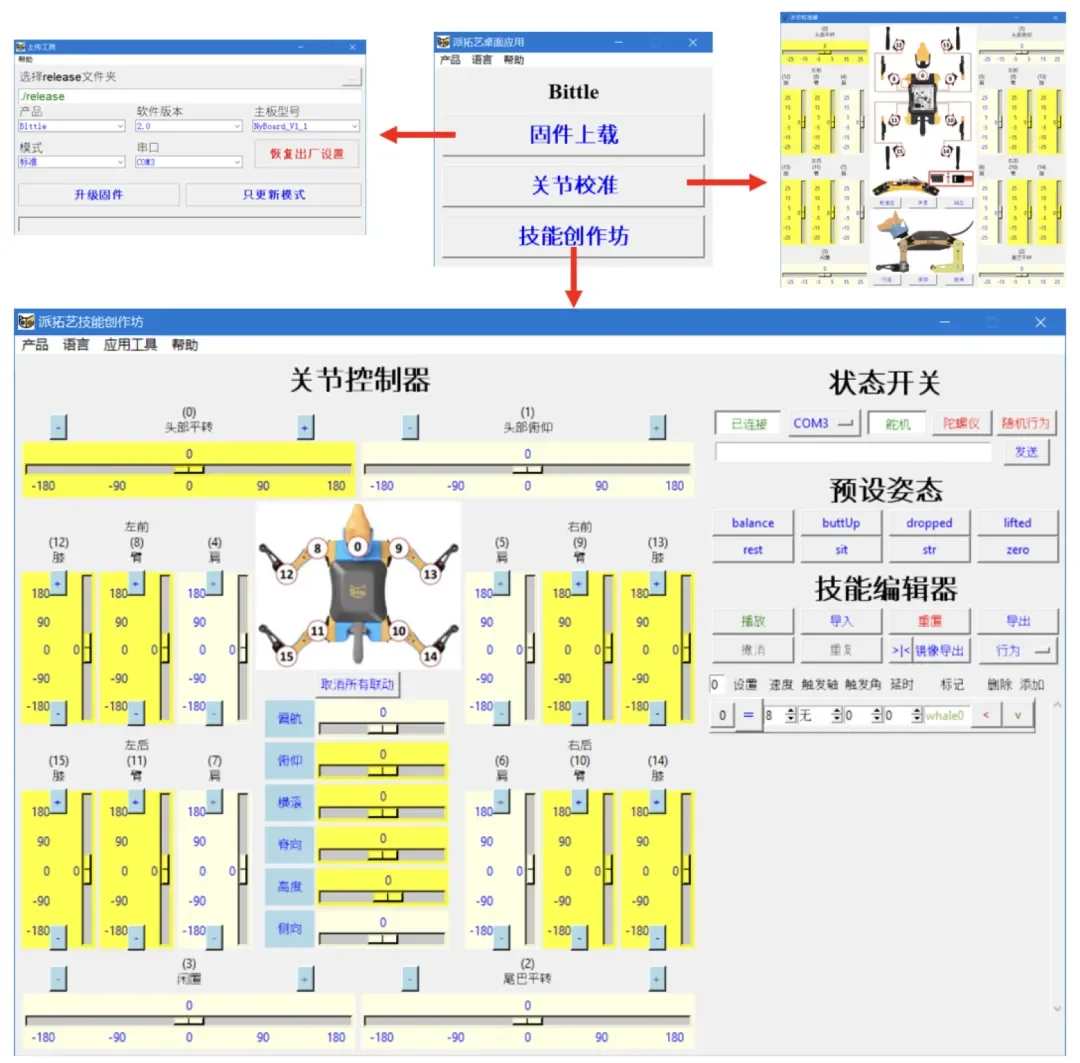
Petoi 桌面应用程序采用 Python3 中的 Tkinker 模块编写,为您提供简洁的图形用户界面来配置固件、校准机器人并可以为您的机器人设计自定义动作。 主要功能模块是固件上载、关节校准和技能创作坊。
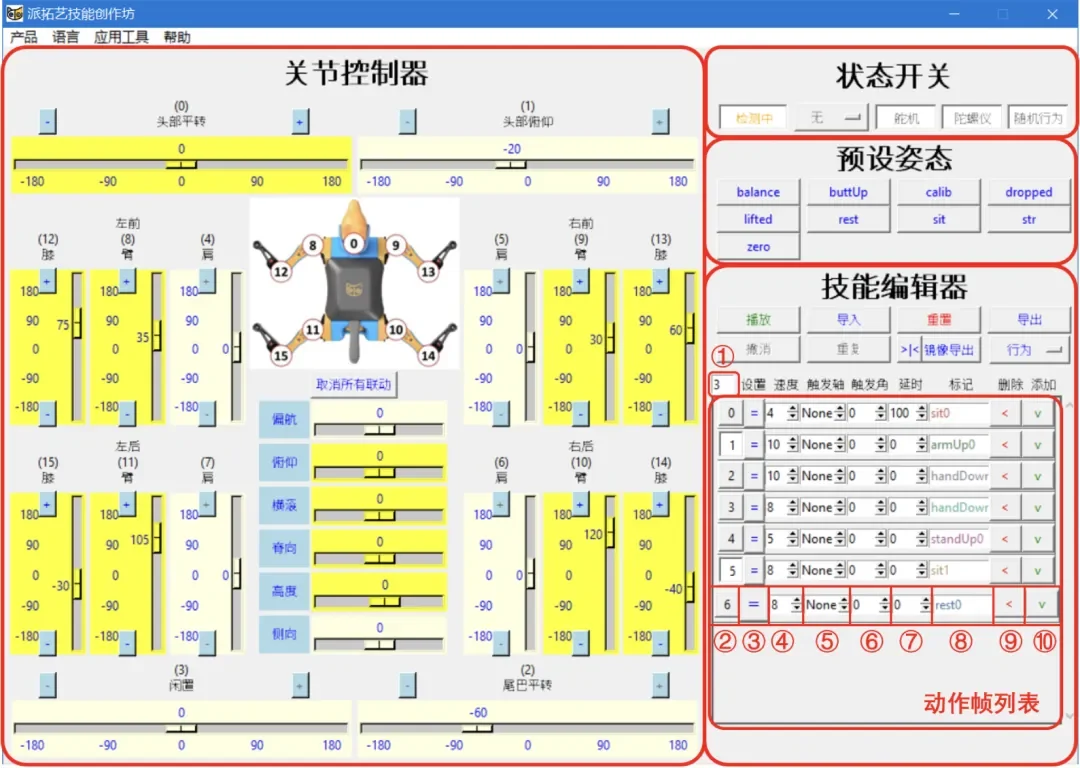
🤖 Bittle 机器狗动作设计

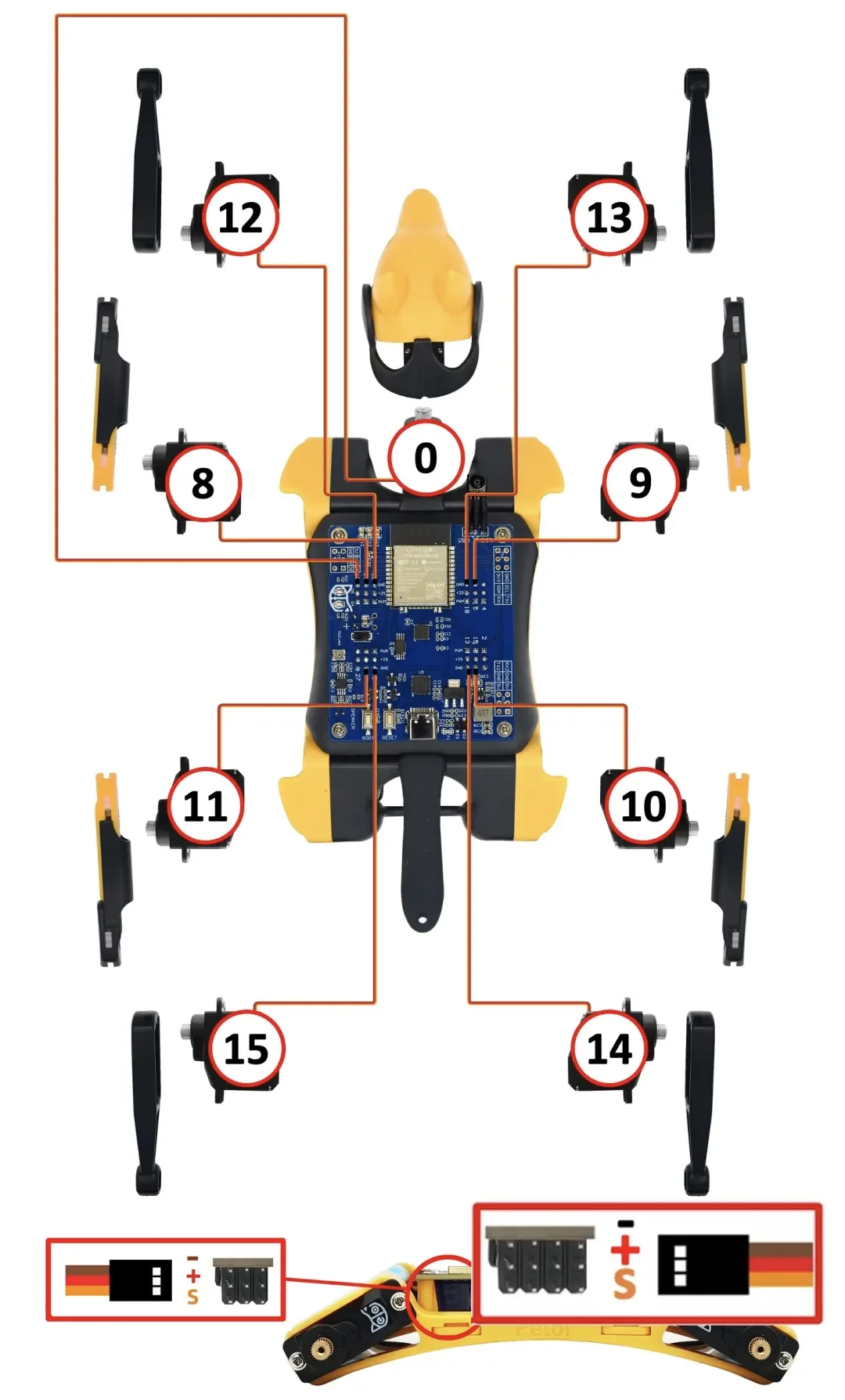
我们人类和许多其他有腿动物都有很多关节。 这些关节让我们能够以多种方式自由行动。Petoi Bittle 机器狗整体有12个舵机驱动的关节,当控制这么多关节时,首先要做的就是对它们进行索引。 我们可以根据它们与躯干的距离来定义顺序。然后,我们可以这样对关节进行排序:头部平转、头部倾斜、尾部平转、尾部倾斜、4x 肩部(或臀部)开合、4x 肩部(或臀部)俯仰、4x 肘部(或膝盖)。
🤖 Bittle 机器狗源码
Petoi Bittle机器狗基于OpenCat开源框架提供支持,您可以使用简单的Scratch、C++或Python代码来为您的仿生狗编程新的行为,例如向后走、跳舞和自定义技巧。
Bittle还与Arduino和Raspberry Pi生态系统兼容,你可以很容易地组合多种传感器,让你的狗更有意识,还可以通过编程接口教会他更多的新技能。
Petoi Bittle机器狗开源项目地址:
https://github.com/PetoiCamp/OpenCatEsp32-Quadruped-Robot
文章来自微信公众号 “ loT物联网技术 “


【开源免费】DeepBI是一款AI原生的数据分析平台。DeepBI充分利用大语言模型的能力来探索、查询、可视化和共享来自任何数据源的数据。用户可以使用DeepBI洞察数据并做出数据驱动的决策。
项目地址:https://github.com/DeepInsight-AI/DeepBI?tab=readme-ov-file
本地安装:https://www.deepbi.com/
【开源免费】airda(Air Data Agent)是面向数据分析的AI智能体,能够理解数据开发和数据分析需求、根据用户需要让数据可视化。
项目地址:https://github.com/hitsz-ids/airda
