# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
「质疑图恒宇,理解图恒宇,成为图恒宇。」
在《流浪地球 2》中,刘德华饰演的图恒宇是一个令人印象深刻的角色。为了让在车祸中去世的女儿拥有「完整的一生」,他不顾人类世界对「数字生命计划」的禁令,一直在暗中独自努力完善数字生命的架构,并最终决定公然违规,将女儿的数据上传至量子计算机,之后因此被捕入狱。

电影《流浪地球 2》中的数字生命图丫丫。
电影上映后,有关「数字生命」的话题经过了很多讨论。
最近,这个话题被再次提起,起因是不少失去亲友的人正在尝试用 AI 技术「复活」逝者,制作出一系列包含逝者形象的虚拟视频。一个「质疑图恒宇,理解图恒宇,成为图恒宇」的评论被赞上万次。
不过,这些视频大多没有可互动性。按照现在的技术,即使设置了互动功能,屏幕里的人也会因为违背一些物理直觉而显得很假。毕竟,理解物理世界,并按照物理世界的规律去运动、思考依然是一个没有解决的问题,就连最近大火的 Sora 视频生成模型也被认为做不到这一点。
更何况,能真正以假乱真的「数字生命」被认为是要拥有自主意识的。而意识是什么,如何构建,在科学界都没有达成共识。所以,真正的「数字生命」其实离我们还很遥远。
不过,人工智能科学家和神经科学家正在联手,朝着这一方向努力。
这是谷歌 DeepMind 和美国 Janelia 研究园区(霍华德・休斯医学研究所成立的神经科学研究机构)共同研究出的一个虚拟果蝇,它能像真实的果蝇一样行走和飞行。
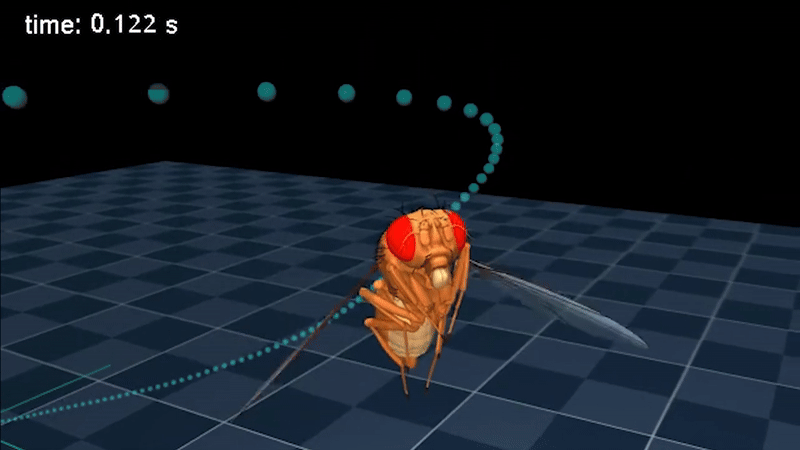
这段视频显示,虚拟果蝇再现了真实果蝇的飞行动作(自发转弯),执行以 2 厘米 / 秒的速度行走的命令,同时向左、向右转弯。模型还模仿了真实果蝇的行走轨迹,包括以不同速度行走、转弯和短暂停止。
同时,它也是迄今为止最逼真的果蝇模拟,结合了新的解剖学精确模型、快速物理模拟器和根据果蝇行为训练的人工神经网络,以模仿真实果蝇的动作。
除了在复杂的轨迹上行走和飞行,虚拟果蝇还能用眼睛控制和引导飞行。
「你获取真实的果蝇数据 —— 它们是如何飞行的,如何行走的 —— 训练网络来模仿这些动作,然后让我们训练好的这个网络来控制果蝇,告诉果蝇如何运动,」Janelia Turaga 实验室的机器学习研究员 Roman Vaxenburg 领导了这个项目。他说,「它就像一个小型大脑,控制着果蝇的动作」。
新模型是该团队虚拟果蝇的首次迭代,他们计划利用更多的解剖和感官特征以及真实的神经网络使其更加逼真。这也是他们所希望实现的一系列逼真动物模型中的第一个。他们和其他研究人员现在可以利用这个通用的开源框架来开发这些模型。
这些模型可以帮助科学家更全面地了解神经系统、身体和环境是如何共同控制行为的。几十年来,研究人员一直在实验室中用真实动物探究这些问题,而逼真的虚拟模型将使科学家们能够了解所有这些组成部分是如何相互联系的,以及实验室中无法测量的因素 —— 比如飞行时施加在身体上的力是如何影响行为的。
「对身体的模拟可以告诉你神经系统的指令是如何转化为动作和行为的,而这个『如何』与身体的形状以及身体如何与世界互动的物理学有关,」该项目的高级科学家、Janelia 小组组长 Srinivas Turaga 说,「所有这些都编入了这个物理模拟中」。
这段视频显示了果蝇模型以 30 厘米 / 秒的速度在固定高度执行直飞指令,随后果蝇模型再现了真实果蝇的飞行动作:躲避感知到的威胁和自发转弯。接下来展示的是果蝇模型以 2 厘米 / 秒的速度执行行走指令,同时向左转和向右转,然后是果蝇模型模拟真实果蝇的行走轨迹,包括以不同速度行走、转弯和短暂停止。
新模型建立在以前模拟果蝇行为的工作基础上,包括使用简化的蝇体和手动控制系统来模拟飞行的「大统一果蝇(Grand Unified Fly)」。最近推出的 NeuroMechFly 使用逼真的身体模型和带有学习组件的手动控制系统来模拟行走。
在这项新研究中,Janelia 的研究人员和 DeepMind 的科学家在高级研究科学家 Yuval Tassa 和 Josh Merel 的领导下,着手改进果蝇模型的解剖学、生物力学、物理学和行为学信息,以创造出一种能够执行多种行为的更逼真的果蝇模拟。这项工作是 Janelia 和 DeepMind 之间的多项合作之一,双方利用各自在神经科学和人工智能领域的专业知识共同解决科学问题。
DeepMind 高级研究总监 Matthew Botvinick 说:「尽管人们普遍承认,理解大脑功能取决于理解身体及其与其他物理对象的相互作用,但计算神经科学研究很少寻求在这种全局层面上模拟事物。在与 Srini 和这个团队的其他成员进行头脑风暴的过程中,我们意识到有一个令人兴奋的机会,可以在果蝇研究的背景下将所有的碎片整合在一起」。
整个果蝇的打造过程可以概括为:
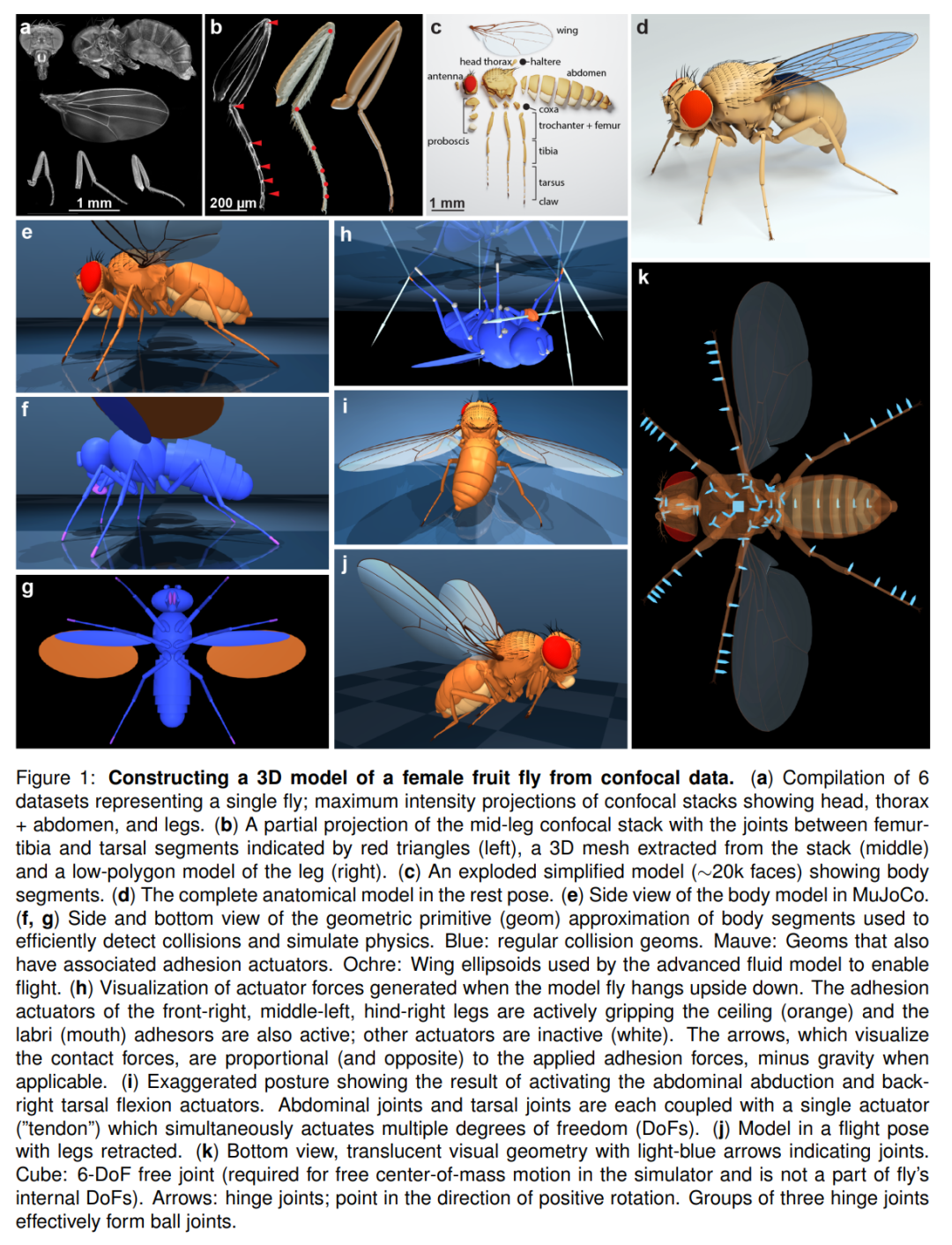
首先,Janelia 研究专家 Igor Siwanowicz 用显微镜对成年雌果蝇的各个部位进行了成像,并使用计算机软件构建了一个解剖学上精确的果蝇体外虚拟模型,其中包括果蝇关节和附肢的运动。
DeepMind 的研究人员 —— 包括 Tassa、Merel 和研究工程师 Guido Novati—— 将这一虚拟模型转化为代码,并输入 MuJoCo 模拟器,这是一个专为机器人和生物力学设计的快速开源物理模拟器。该工具使研究人员能够虚拟模拟现实世界中物体的运动和互动方式。
为了支持果蝇模型,研究人员对模拟器进行了重大升级,包括附着力致动器,以模拟昆虫脚抓物体表面时产生的力。研究小组还请 Novati 设计了一个新的流体力学模型,用于描述果蝇在空中飞行时所受的力。该项目的资深作者 Tassa 说,该模型可以支持各种空气动力学行为,包括展翅飞翔。这里,他们用到了端到端强化学习。
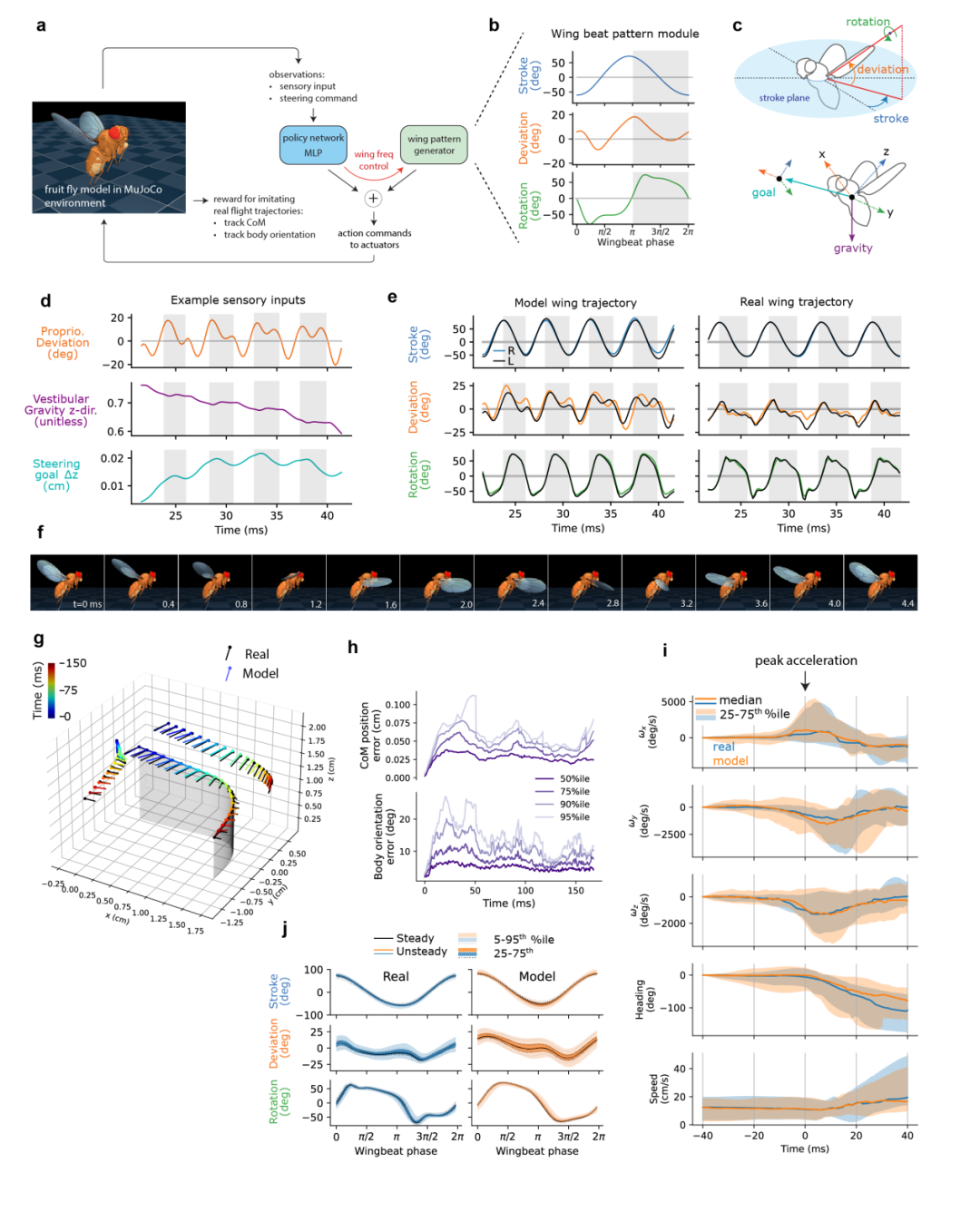
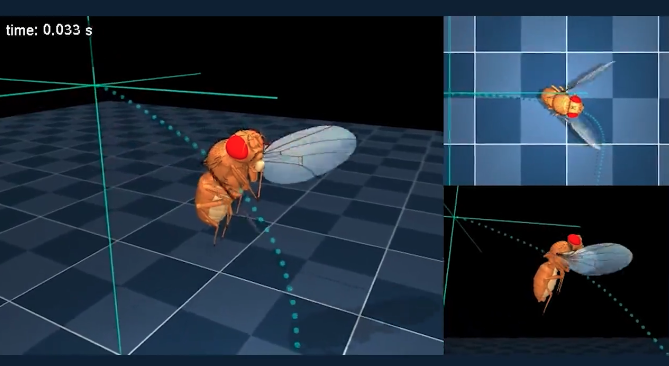
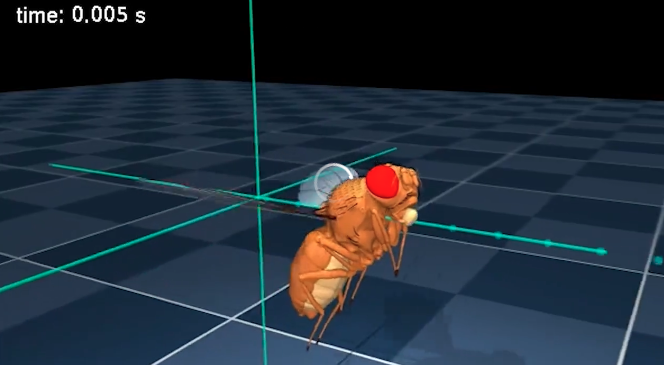
飞行模拟。
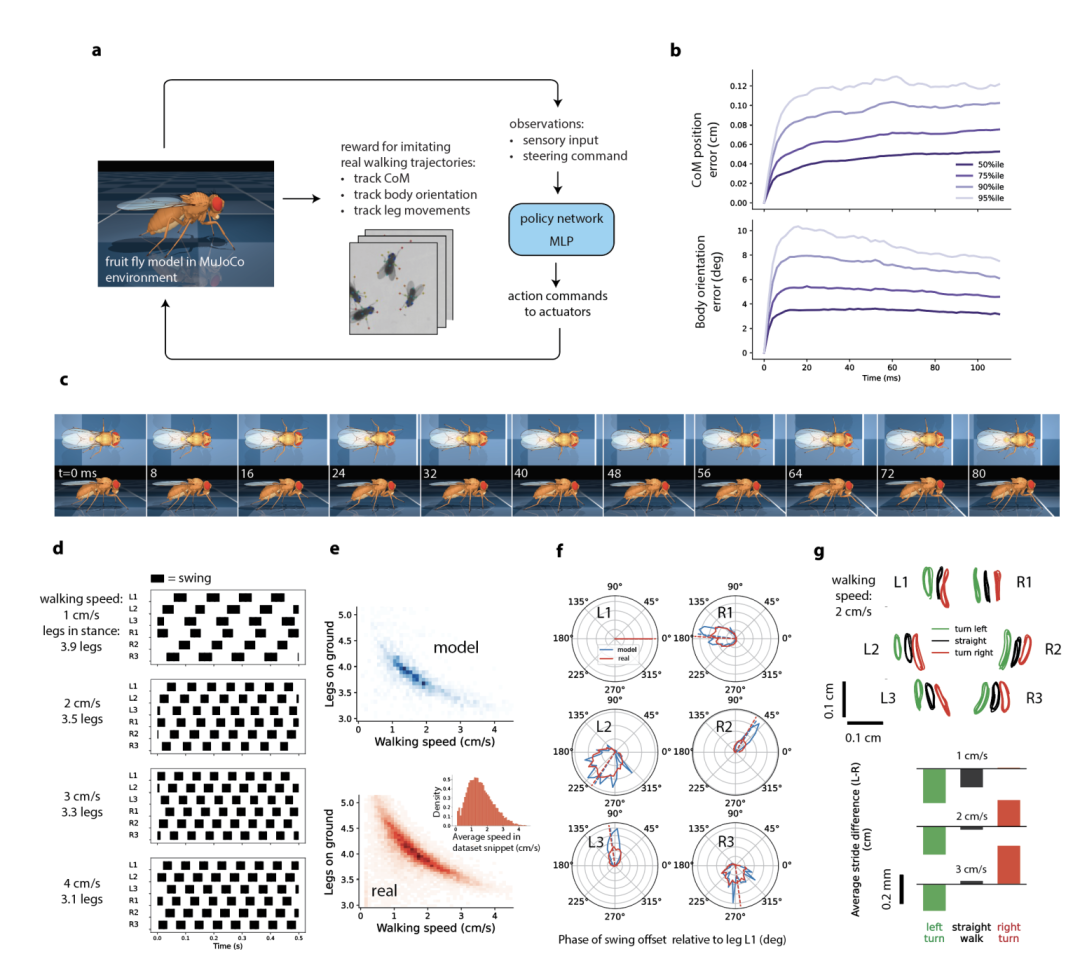
行走模拟。

视觉引导飞行任务:高度控制和避障。
Tassa 还表示:「由于作用在果蝇身上的力是如此微小,对这样一种小昆虫进行建模非常具有挑战性。」
接下来,Vaxenburg 建立了一个人工神经网络,并根据真实的果蝇行为对其进行训练,方法是向该网络提供由果蝇行为专家录制的视频信息,这些专家包括 Janelia 高级小组负责人 Kristin Branson 和 Michael Reiser、HHMI 研究员 Gwyneth Card 和加州理工学院教授 Michael Dickinson。
Vaxenburg 说:「我们的目标是提高逼真度,这通过两个方面的工作来实现:一个是改进解剖细节的捕捉,即果蝇的构造;另一个是捕捉行为,即果蝇的动作和反应。」

上图展示了果蝇模型的身体结构和自由度。果蝇模型由 67 个身体部分组成,由 66 个关节连接,相当于 102 个自由度。图中显示了所有自由度以正弦波方式运动的序列。
这个新模型只是一个开始。下一步,研究小组希望将果蝇解剖结构的其他部分(如肌肉和肌腱)以及逼真的感觉系统纳入虚拟昆虫中,从而创建一个更加逼真的果蝇模型。他们还希望能够使用真实的神经网络,如果蝇腹侧神经索连接体,为模型提供动力。
鉴于研究小组已经证明他们能够创建这类逼真的虚拟模型,未来,他们还想创建虚拟小鼠和斑马鱼,这两种生物被神经科学家广泛研究。他们用来创建虚拟果蝇的流程也可供全球研究人员免费使用,使其他人也能创建自己的逼真模型。
Turaga 说:「我们已经展示了如何做到这一点,我们可以为另一种生物再做一次。」
目前,关于这一研究成果的论文已经在 bioRxiv 上发布。作者在论文摘要中写到,「动物的身体决定了神经系统如何产生行为。因此,对感觉运动行为的神经控制进行详细建模需要一个详细的身体模型。」为此,他们在 MuJoCo 物理引擎中提供了一个解剖学上详细的黑腹果蝇全身生物力学模型,也就是我们前面介绍的虚拟果蝇。
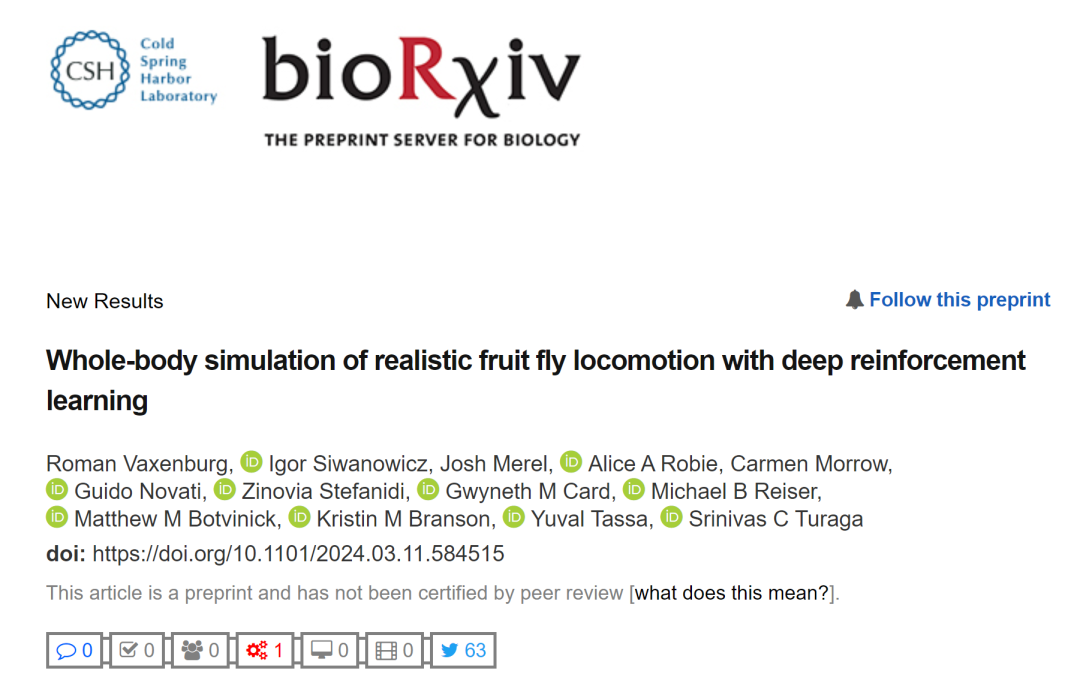
论文链接:https://www.biorxiv.org/content/10.1101/2024.03.11.584515v1
在社交媒体上,这项研究吸引了不少网友的关注,有人问:它会进化吗?还有人问:他们也能做个模拟人的模型吗?

这些网友甚至提供了新的研究思路:
这一切看起来都很有前景。
不过,抛开这些尚且比较遥远的联想,这项果蝇研究对当前的医疗保健研究也很有意义,可以助力从药物发现到疫病建模等一系列领域的研究。
参考链接:https://www.janelia.org/news/artificial-intelligence-brings-a-virtual-fly-to-life
文章来自微信公众号 “机器之心”



【免费】cursor-auto-free是一个能够让你无限免费使用cursor的项目。该项目通过cloudflare进行托管实现,请参考教程进行配置。
视频教程:https://www.bilibili.com/video/BV1WTKge6E7u/
项目地址:https://github.com/chengazhen/cursor-auto-free?tab=readme-ov-file
