# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
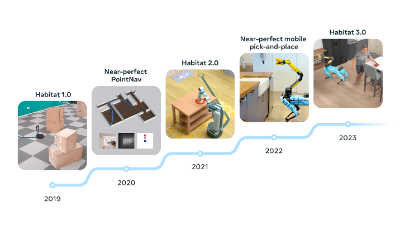
Meta Platforms Inc.的基础人工智能研究团队的研究人员宣布推出AI仿真环境Habitat的更高级版本,该环境用于教导机器人如何与物理世界互动。
随着 Habitat 3.0 的推出,该公司还宣布发布 Habitat Synthetic Scenes 数据集(一个由艺术家创作的 3D 数据集,可用于训练 AI 导航代理)以及 HomeRobot(一个经济实惠的机器人助手硬件和软件平台)在模拟和现实环境中使用。
在一篇博客文章中,FAIR 研究人员解释说,新版本代表了他们在“嵌入式人工智能”方面的持续进步。这里的“他们”指的是AI代理能够感知物理环境并与其交互,与人类合作伙伴安全地共享该环境,并在数字世界和物理世界中与这些人类合作伙伴进行沟通和协助。
Habitat 是办公空间、家庭和仓库等虚拟环境的目录,可用于训练和改进人工智能驱动的机器人在现实世界中导航。其中的虚拟环境是使用红外捕获系统精心构建的,该系统甚至可以测量桌子、椅子甚至书籍等物体的精确形状和大小。在这些环境中,研究人员可以训练机器人完成复杂的多步骤任务,这些任务需要能够看到和理解周围的环境。
Habitat 3.0通过支持机器人和人形化的角色,扩展了现有的能力,使人机合作可以在许多不同的任务上进行。例如,人类和机器人可以一起清理起居室或在厨房准备食谱。FAIR表示,这将为人机合作在各种多样化、逼真任务中的研究开辟新的途径。FAIR 表示,Habitat 3.0 中的人类化身据说极其逼真,具有自然的步态和动作,可以实现最真实的低级和高级交互。
“这种人类和机器人在模拟环境中的共存使我们第一次能够在类似家庭的环境中学习机器人人工智能策略,并在类似家庭的环境中执行日常任务,并通过真实的人类在环中对其进行评估。”研究人员写道。
FAIR 表示,Habitat 3.0 将使机器人 AI 代理学习某些东西所需的时间从几个月甚至几年缩短到几天。它还将能够在安全的模拟环境中更快速地测试新模型,而无需承担任何风险。
为 HSSD-200 的栖息地合成场景数据集也将有助于加速具体人工智能研究,因为现实世界场景的 3D 模拟对于训练至关重要。FAIR 解释说,HSSD-200 优于之前提供的数据集,因为 3D 场景比以前更准确地反映了物理世界场景。它由 211 个复制现实世界房屋和其他环境的高质量 3D 场景组成,并包含 466 个语义类别内的 18,656 个物理世界对象模型。
据 FAIR 称,HSSD-200 提供与 WordNet 本体相对应的细粒度语义分类,而其资产压缩可实现更高性能的 AI 模拟。这些单独的物体均由专业 3D 艺术家创作,准确匹配现实世界品牌制造的家具和电器的外观和尺寸。
最后,FAIR 推出了一个新的HomeRobot 库,它是一个硬件和软件规范,适用于希望创建物理机器人以将其 Habitat 训练的模型应用于物理世界的研究人员。
HomeRobot 基于用户友好的软件堆栈和价格实惠的硬件组件,这意味着它可以快速轻松地设置,并为现实世界的测试做好准备。它是专门为开放词汇移动操纵研究而设计的,这是指可以在任何看不见的环境中拾取物体并将其放置在指定位置的机器人。为此,机器人必须能够感知和理解它们遇到的新场景。
Constellation Research Inc. 的 Holger Mueller 表示,Meta 的声明显示了真正的进步,超越了生成式 AI 的炒作,拥有可用于在虚拟世界中训练和测试智能机器人的强大软件。他说:“人居 3.0 现在的重点是人机交互,因为如果我们要制造能够融入我们日常生活的机器人,这是一个需要完善的关键里程碑。” “HSSD-200 数据集非常有用,因为在这些环境中生成物理对象非常昂贵并且需要大量时间。”
FAIR 表示,这些发展还会带来更多成果。该公司正在进行的嵌入式人工智能研究接下来将重点关注机器人如何在反映我们生活的现实世界的动态、不断变化的环境中与人类协作。
研究人员解释说:“在我们研究的下一阶段,我们将使用 Habitat 3.0 模拟器来训练我们的人工智能模型,以便这些机器人能够帮助他们的人类伙伴并适应他们的偏好。” “我们将使用 HSSD-200 与 Habitat 3.0 结合大规模收集人机交互和协作的数据,以便我们可以训练更强大的模型。我们将专注于将模拟中学到的模型部署到物理世界中,以便我们可以更好地衡量它们的性能。”
文章来自 “ siliconangle ”


【开源免费】OWL是一个完全开源免费的通用智能体项目。它可以远程开Ubuntu容器、自动挂载数据、做规划、执行任务,堪称「云端超级打工人」而且做到了开源界GAIA性能天花板,达到了57.7%,超越Huggingface 提出的Open Deep Research 55.15%的表现。
项目地址:GitHub:https://github.com/camel-ai/owl
【开源免费】Browser-use 是一个用户AI代理直接可以控制浏览器的工具。它能够让AI 自动执行浏览器中的各种任务,如比较价格、添加购物车、回复各种社交媒体等。
项目地址:https://github.com/browser-use/browser-use