# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
具备高自由度运动下稳定且高精度作业能力。
作为人类身体关节中最灵活的部分,206块人体骨骼中,手部关节就占了四分之一。这也意味着,在人形机器人日趋接近人类智能的今天,想要令其能落地具体场景、并完成任务,一双灵巧手的感知和操控,对机器人能力的突破起到重要作用。
当前,灵巧手操作以视觉方案为主,基于高清摄像头、相机等视觉传感器,对周围环境的图像数据进行捕捉及处理,构建三维立体结构,可提供实时的视觉反馈,帮助人形机器人准确识别、定位和操作。
但在复杂环境中,由于受到光照、遮挡、透视变形等因素影响,可能导致视觉传感器出现感知不完整、信息失真的情况。触觉方案可以有效弥补这一局限。
通过实时感知机器人与物体间的接触力和接触状态,触觉传感器所接收到的信息反馈更及时、精确,有助于灵巧手调整其操作状态,比如抓取力度、姿态或手部动作的轨迹等,确保稳定精准地完成任务。在面对柔软、易碎或不规则形状的物体时,触觉传感器反馈显得尤为重要。
随着灵巧手对触觉传感器的感知要求提升,低精度、低灵敏度、分辨率差和高成本的传统触觉传感器,无法满足市场需求,不适宜大面积部署;而高端触觉传感器则以欧美等国垄断,占据80%以上的市场。作为人形机器人及其他先进制造业的底层技术,加快触觉传感器国产化替代成为关键命题。
硬氪长期关注的帕西尼感知科技(PaXini Tech.),正是一家以多维触觉传感技术为核心的触觉传感器和人形机器人创新公司,其核心产品覆盖多维度触觉传感器、多指触觉灵巧手、到人形机器人的全线布局。
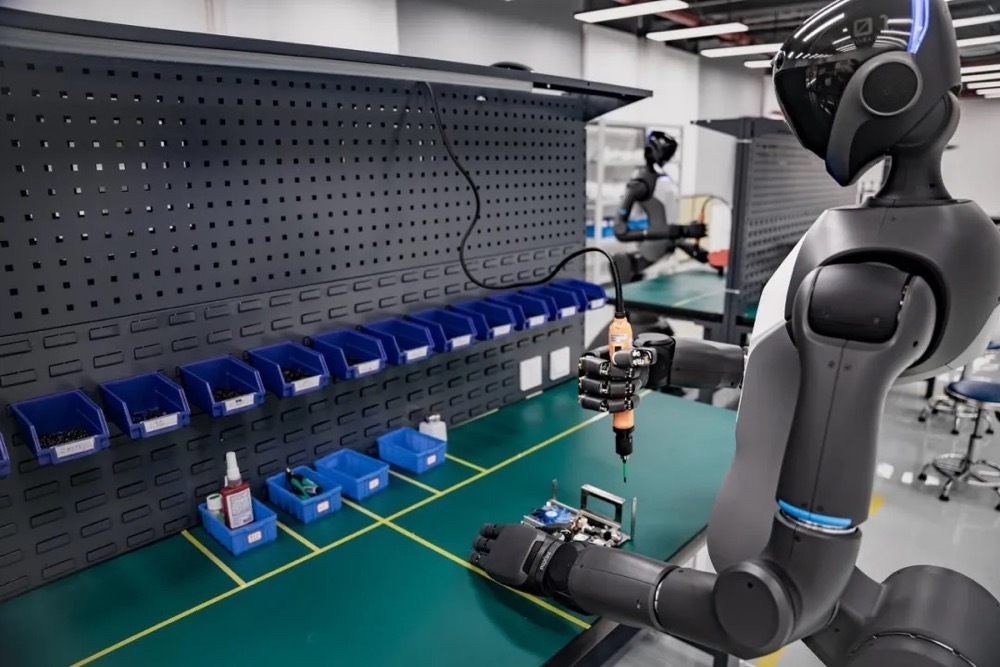
今年2024WRC上,帕西尼感知科技正式发布了其第二代多维触觉人形机器人TORA-ONE、第二代多维触觉灵巧手DexH13,及基于ITPU(Intelligent Tactile Processing Unit,多维触觉处理单元)技术的多维度触觉传感器PX-6AX GEN2。
一个需要承认的现实情况是,匹配现阶段机器人智能水平下,上半身的操作能力覆盖了其一大部分的应用,例如工厂流水线组装、机械臂焊接、搬运等。当人形机器人进入更多落地场景中去,将涉及到人类生活中大量的精细化操作任务,需要其具备更丰富的感知、可靠的决策与稳定的执行能力。
以触觉传感器为依托,帕西尼感知科技已具备从核心零部件、灵巧手到人形机器人整机制造的全链条生产能力。产品正广泛应用于工业制造、精密加工、医疗健康以及仓储物流等多个领域。
从外形来看,帕西尼感知科技发布的第二代多维触觉人形机器人TORA-ONE,在双臂和灵巧手的自由度上都进行了升级。人形机器人的自由度越多,其灵活性和通用性也越好。
TORA-ONE整机共由47个自由度组成,包括本体21个、四指仿生灵巧手26个,单臂负载能力为5公斤。其中,四指仿生灵巧手DexH13、以其所搭载的多维触觉传感器PX-6AX GEN2,是帕西尼感知科技此次推出的两大核心产品。
在以工业机器人为代表的上一代机器人中,末端执行器根据应用场景的需求,其手部多以抓夹形态存在,只能执行产线上单一类型的任务,通用性不高。
DexH13作为一款多维触觉灵巧手,也是市面上目前首款融合了触觉、视觉双模态的四指仿生灵巧手,其单手拥有13个主动自由度;既可以完成托举、夹取、焊接等工业任务,也能模拟人类做抓取、旋转等复杂的手部动作,在柔性任务中表现良好。
多模态感知,柔性作业
为了增加触觉感知灵敏度和手抓力反馈,帕西尼感知科技在DexH13双手上,搭载了近2000颗自研生产的高精度触觉传感器PX-6AX GEN2,能在超高分辨力下进行压感、摩擦、软硬质地等15种多维触觉感知,达到全量程0.01N高精度测量;并提供精细温度补仪,除三维、六维力外,还能对材质、温度多维物理信息触觉感知。
而在视觉方面,DexH13双手集成了有800万高清AI手眼相机,基于先进的零样本位姿估计视觉算法,搭配上TORA-ONE的5个摄像头和2个深度摄像头,能够识别和抓取物体六维位姿,适应多种复杂环境和任务。
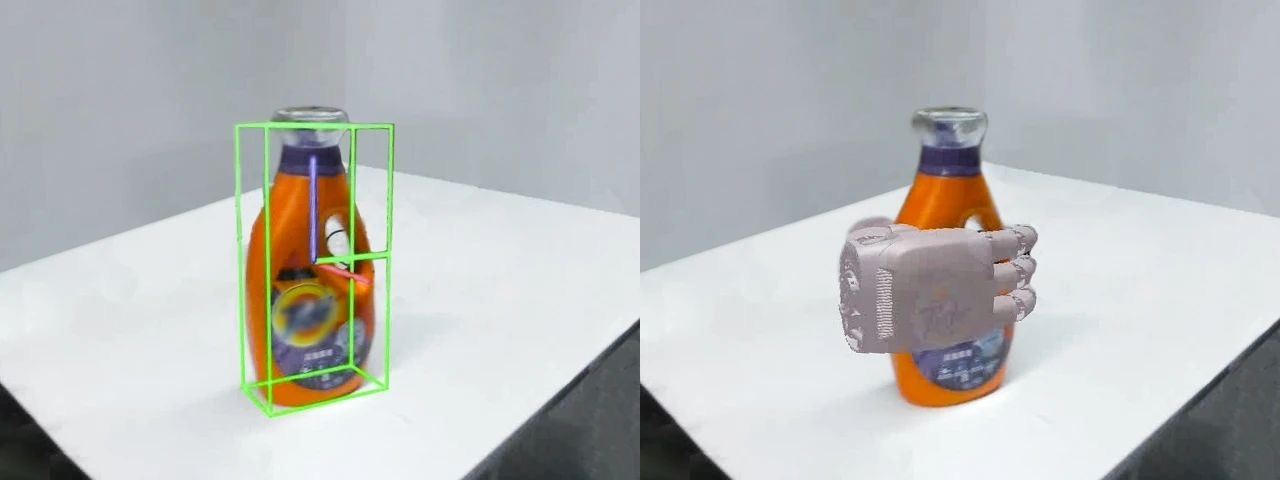
基于VTLA多模态感知模型进行物体位姿及抓取姿态估计,并评估精确抓握点
在TORA-ONE整机的下肢方面,其底盘和躯干采用了高度模块化结构设计稳定性强,腰部的折叠设计能进行灵活伸展,身高区间在1.46米至1.86米,以适应于工业制造、医疗康养、仓储物流等多种立体空间高度的作业需求。
它配备了高运动性通用移动底盘,可进行360度全向移动能力,即使是复杂的车间布局或动态工作环境中,也能完成自适应快速移动,最大速度可达 1m/s,续航时长达8小时,为工业生产高强度连续作业提供可靠、稳定的动力支撑。
同时TORA-ONE的移动底盘还配备了激光雷达SLAM定位导航系统,能够在复杂的三维环境中精确定位,准确识别各种物体和位置信息,迅速规划最优行动路径,精准避障,极大地提高生产效率和操作稳定性。

跨场景高效作业
今天,尽管传统的大型工业自动化设备在一定程度上提升了生产效率,但由于缺乏对复杂场景的认知能力,应用空间局限,多用于解决特定简单任务,难以迅速灵活应对精巧复杂的手工产品及复杂多变的生产需求。
趋于复杂及高度定制化需求的产品大幅增加,灵活且精准的响应批量定制订单是关键所在。
以工业场景为例,在精装配送环节,TORA-ONE基于触觉传感器和视触觉多模态感知模型,可以快速感知并判断出零部件的形状、尺寸和材质等信息,而后用灵巧手完成精密配件的组装工作,并将其运输到指定地点。
其采用先进的运动学建模与控制算法,可完成高自由度运动下稳定且高精度作业能力,并与周边设备及环境进行安全、高效的交互,灵活适配各类工件的柔性抓取、装配及上下料等操作。
随着TORA-ONE智能化水平和运动机能的提升,最终实现从单一基础劳动,进入到更复杂的柔性任务中去。

深度学习,持续优化
根据Omdia最新报告数据,预计到2027年,全球人形机器人出货量将超过1万台,到2030年将达到3.8万台,2024-2030年复合年增长率可达到83%。
但作为一个集AI算法、运动控制、硬件结构、供应链等于一体的大型智能移动终端,人形机器人是目前公认的难度系数最高的产品,仅零部件就接近5000余个,系统工程量极大。
人形机器人展现出了庞大的市场需求。但就现阶段来看,行业仍存在技术、成本等问题待解决,部分企业仍处于产品的研发和测试阶段,商业化进程还在早期。
因此,有不少企业或是选择以教育科研、服务机器人、或从核心零部件等商业化更成熟的赛道为切入点,这部分业务可以在早期为企业带来一定的稳定收入,保持造血能力。
其中在硬件方面,除技术难度最高的减速器、伺服系统和控制器外,人形机器人所用到的控制器、传感器、电池系统等,和工业机器人和新能源车等领域的应用有较大的重复性。
以帕西尼感知科技自研的触觉传感器为例。在产品方面,面向消费级机器人、智能家居领域,帕西尼感知科技推出了PX-3AX触觉传感器,主打高性价比,可实现多场景、高精度、多维度的触觉感知。
目前,多维触觉传感器在许多精细化操作场景中应用已十分广泛,基于海量多维度触觉数据,可以有效提升设备操作的可靠性。而多模态模型驱动的算法和AI自主学习能力,可增强在传感器在复杂任务程序和多元场景中的通用性。

灵巧力控,高性能臂手组合
目前,帕西尼感知科技的多维触觉传感器已在工业机器人、手术机器人、移动机器人、服务机器人以及智能座舱中均有落地应用。
官方在线商城也于今日正式上线,其中PX-6AX GEN1已开售,另一款专业级机器人ITPU PX-6AX GEN 2也将计划一周后上线开启发售。
接下来,帕西尼感知科技将继续推动多维触觉传感器在更多场景中应用,开拓潜在市场,同时加快灵巧手的落地进程,从上游零部件、核心设备到人形机器人整机,进一步探索产业化的可能性。
文章来自于“黄楠”,作者“黄楠”。



