破解在线长时序重建难题!纯视觉、单卡实时的公里级流式3D重建|CVPR'26
破解在线长时序重建难题!纯视觉、单卡实时的公里级流式3D重建|CVPR'26在自动驾驶、具身智能、AR/VR应用中做3D重建,大家都想解决一个终极问题: 模型能不能像人一样,一边往前看,一边持续构建三维世界?
来自主题: AI技术研报
8425 点击 2026-03-24 16:28
 搜索
搜索
在自动驾驶、具身智能、AR/VR应用中做3D重建,大家都想解决一个终极问题: 模型能不能像人一样,一边往前看,一边持续构建三维世界?
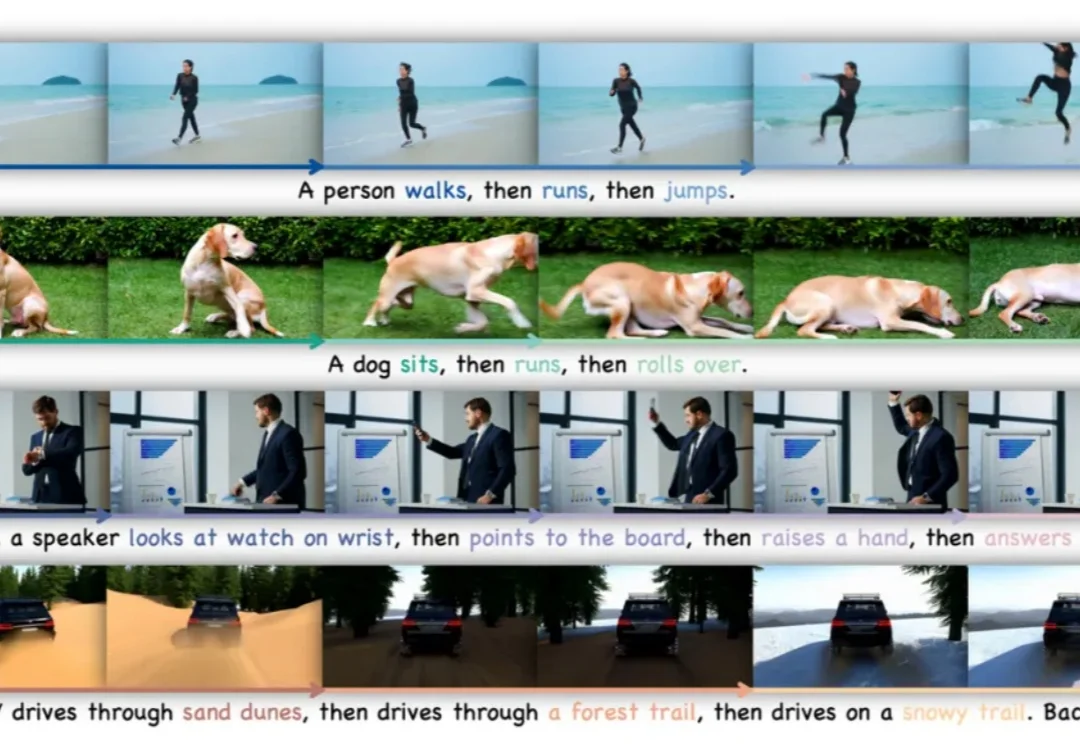
近年来,随着 Sora、Seedance 等文本到视频(T2V)扩散模型的飞速发展,AI 视频生成在视觉保真度与动态表现上已取得突破性进展。特别是近期备受瞩目的 Seedance 2.0,展现出了极其强大的多镜头叙事与复杂分镜控制能力。
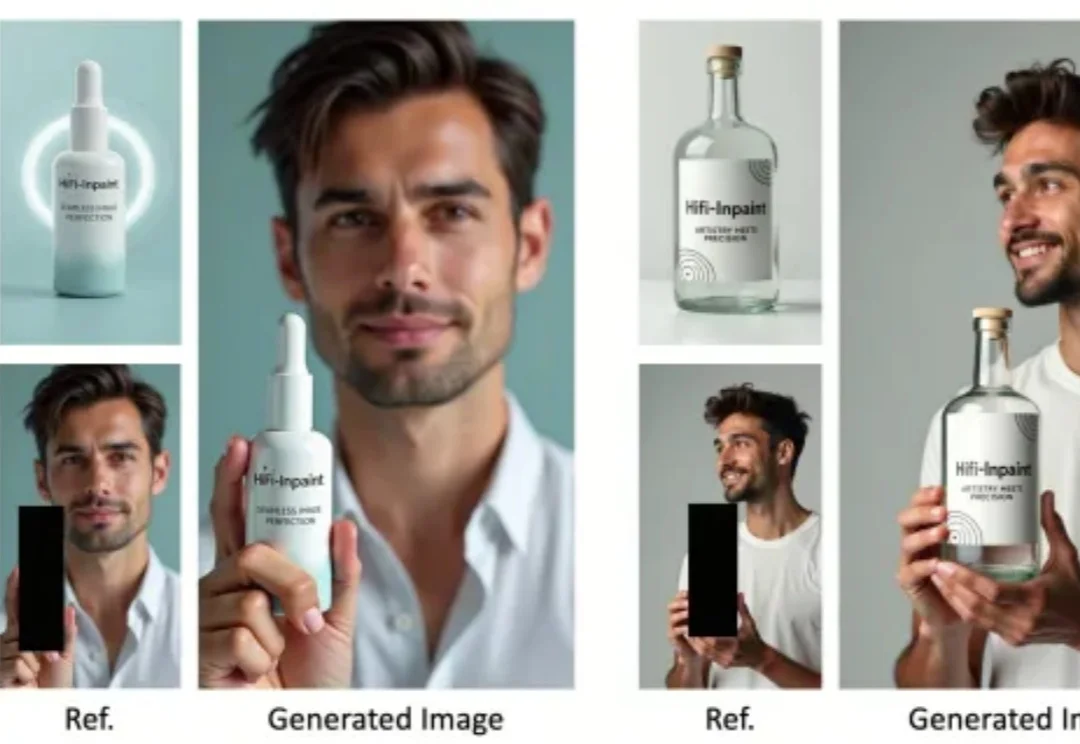
在 AIGC 领域,基于参考图像的图像修复(Reference-based Inpainting)一直是一项备受关注的核心任务,它旨在利用参考图像引导修复过程,生成视觉一致的内容。这一技术在广告营销和电商领域有着巨大的应用潜力,例如让 AI 自动生成 “真人手持或穿戴商品” 的展示图。
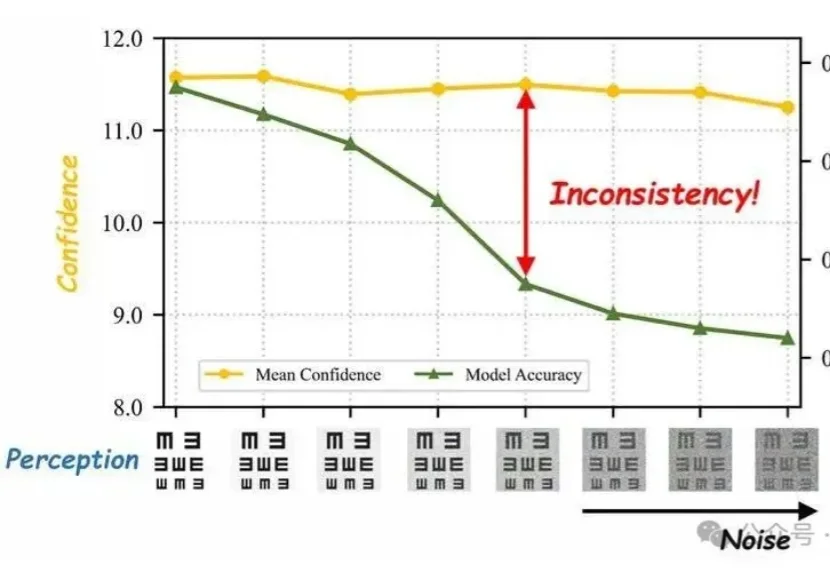
多模态大模型,到底有多“嘴硬”? 浙江大学联合阿里巴巴、香港城市大
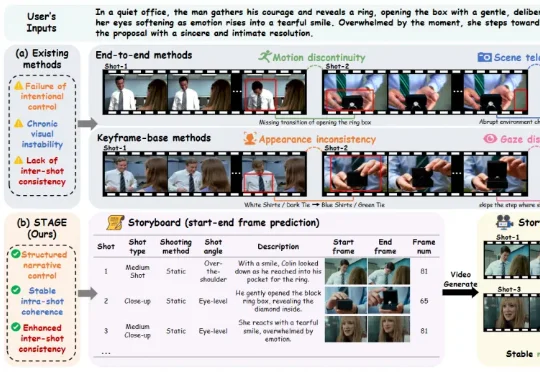
目前,该论文已录用至 CVPR 2026,相关数据集和模型训练训练和推理代码将逐步开源:究其原因,一个好故事并非一堆漂亮镜头的简单拼接,而是一个有结构、有逻辑的叙事整体。
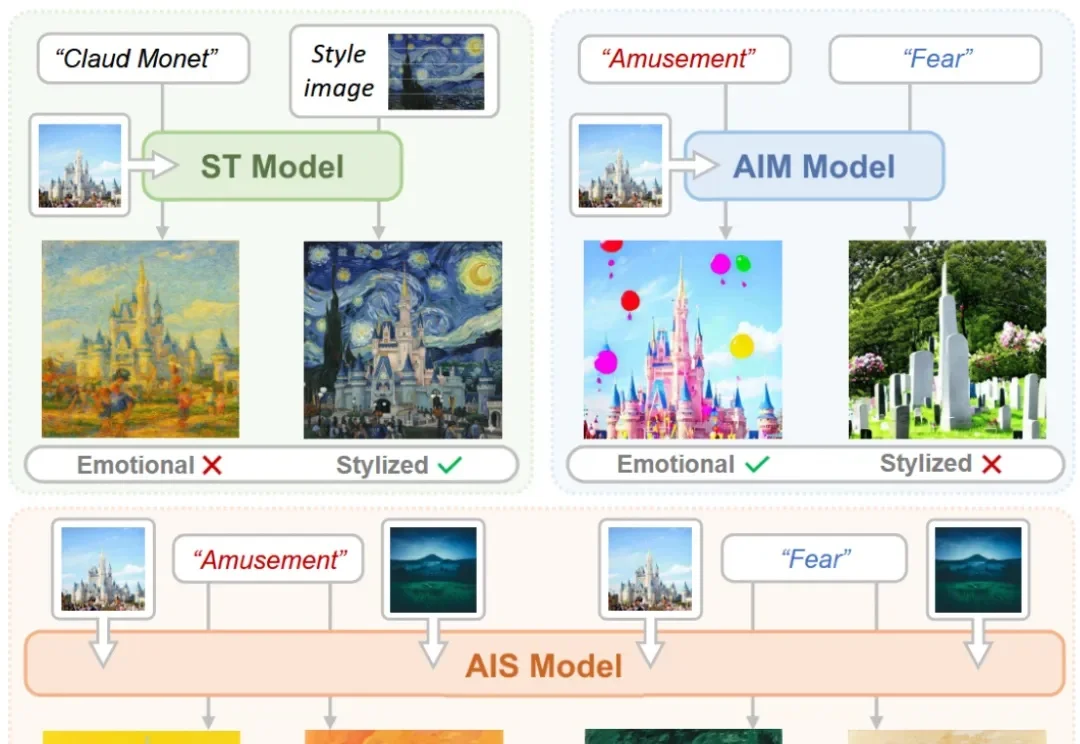
EmoStyle 由深圳大学可视计算研究中心黄惠教授课题组独立完成,第一作者为杨景媛助理教授,第二作者为研二硕士生柏梓桓。深圳大学可视计算研究中心(VCC)以计算机图形学、计算机视觉、人机交互、机器学习、具身智能、可视化和可视分析为学科基础,致力前沿探索与跨学科创新。
当人们谈到“世界模型”(World Models)时,很多人会首先想到近年来迅速发展的生成式视频模型。
本文是北京大学彭宇新教授团队在文本生成视频领域的最新研究成果,相关论文已被 CVPR 2026 接收。

过去一年,具身智能领域迎来了爆发式增长。从后空翻到托马斯回旋,从整理衣物到冲泡咖啡……各类令人惊艳的机器人演示视频层出不穷。
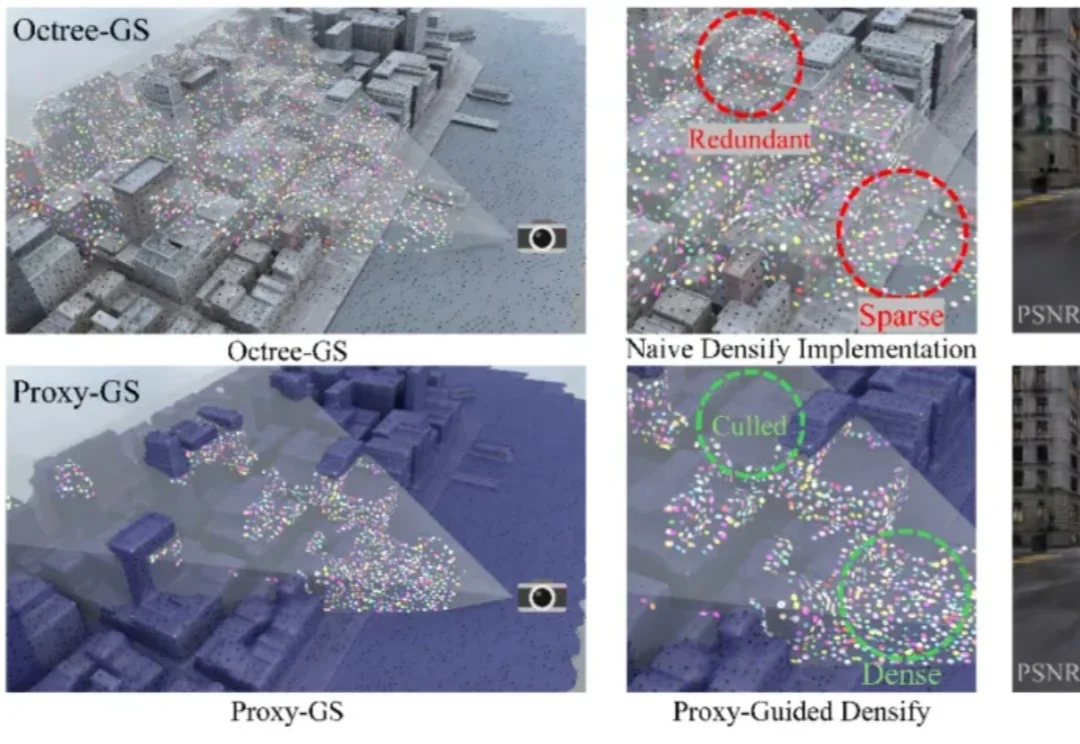
上海交通大学钟志航团队联合上海人工智能实验室、西北工业大学、四川大学等高校在 CVPR 2026 上提出Proxy-GS(Proxy-GS: Unified Occlusion Priors for Training and Inference in Structured 3D Gaussian Splatting),面向基于 MLP 的结构化 3D 高斯溅射(3DGS),