ICML 2026 | 将多教师冲突转化为动态约束,破解多模态大模型推理对齐难题
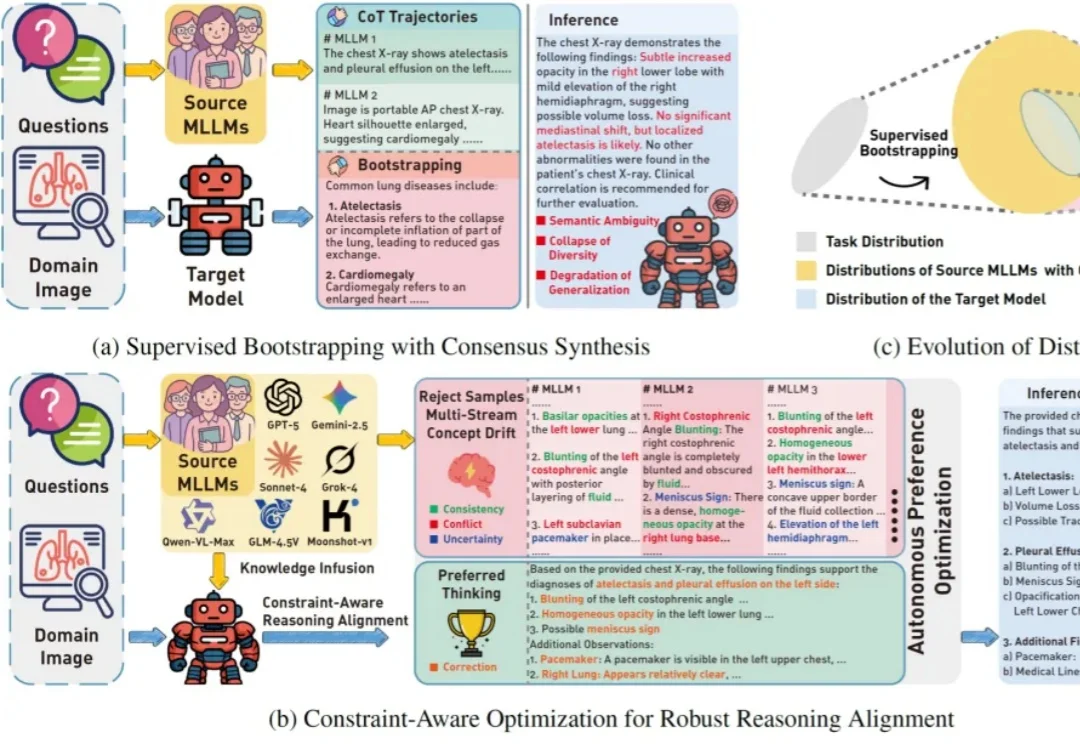
ICML 2026 | 将多教师冲突转化为动态约束,破解多模态大模型推理对齐难题在多模态大模型(MLLM)快速发展的浪潮中,融合多模型 “集体智慧” 已成为提升模型性能的关键路径,并催生了多教师知识蒸馏这一主流范式。然而,不同来源的教师模型在架构与优化上的差异,其在相似推理过程中呈现出不稳定甚至偏移的认知轨迹,即 “概念漂移”(Concept Drift)。
来自主题: AI技术研报
7773 点击 2026-05-14 09:30