
让机器人「不只是走路」,Nav-R1引领带推理的导航新时代
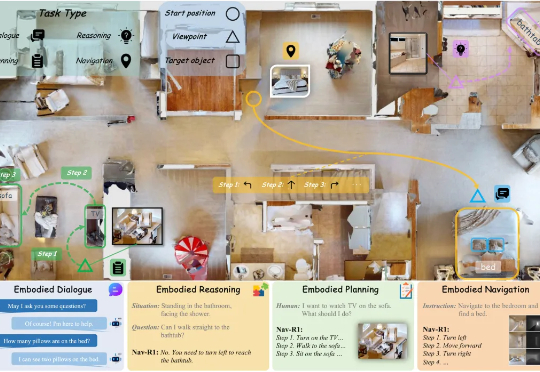
让机器人「不只是走路」,Nav-R1引领带推理的导航新时代这篇题为《Nav-R1: Reasoning and Navigation in Embodied Scenes》的新论文,提出了一个新的「身体体现式(embodied)基础模型」(foundation model),旨在让机器人或智能体在 3D 环境中能够更好地结合「感知 + 推理 + 行动」。简单说,它不仅「看到 + 听到+开动马达」,还加入清晰的中间「思考」环节。
来自主题: AI技术研报
7068 点击 2025-09-18 14:28