SIGGRAPH 2026 | 无需训练,一段单目视频解锁任意运镜与「子弹时间」
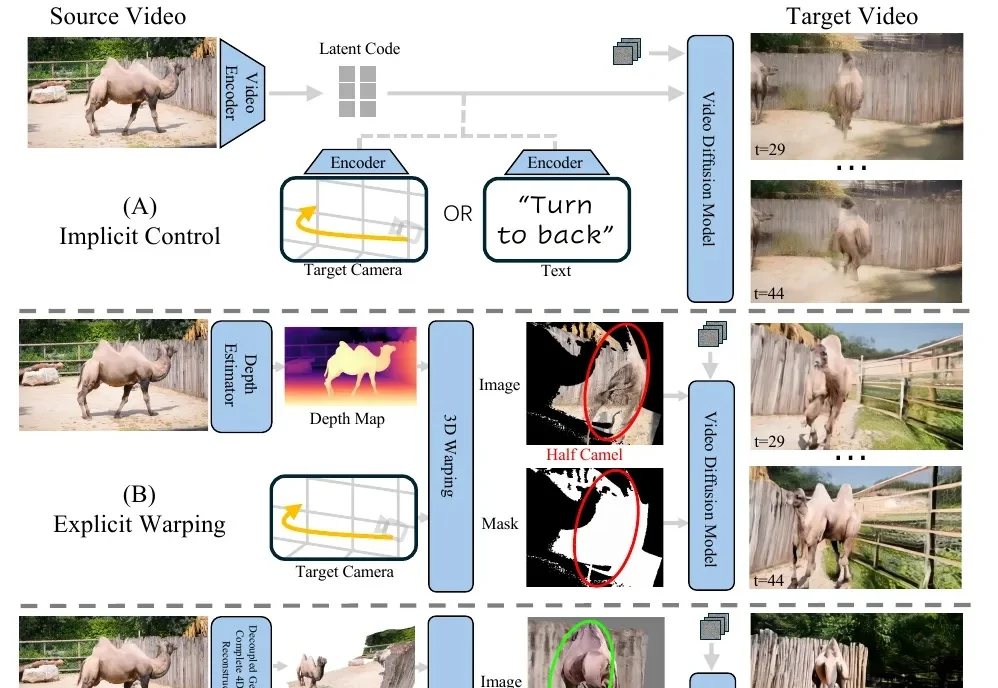
SIGGRAPH 2026 | 无需训练,一段单目视频解锁任意运镜与「子弹时间」给定一段普通单目视频,FreeOrbit4D 可沿任意指定相机轨迹「重拍」整个动态场景,包括影视级的「子弹时间」环绕镜头。
来自主题: AI技术研报
8748 点击 2026-06-25 15:01
 搜索
搜索
给定一段普通单目视频,FreeOrbit4D 可沿任意指定相机轨迹「重拍」整个动态场景,包括影视级的「子弹时间」环绕镜头。
今天上午,利弗莫尔证券数据确认:MOMENTA GLOBAL LIMITED(梦腾智驾环球有限公司)已正式通过港交所上市聆讯,联席保荐人为中金公司、德意志银行。

2026 年 6 月 19 日,John Jumper 在 X 上宣布,自己将离开工作近九年的 Google DeepMind,在短暂休整后加入 Anthropic。随后,DeepMind CEO Demis Hassabis 也公开回复,感谢 Jumper 对 AlphaFold 和 AI for Science 的贡献。
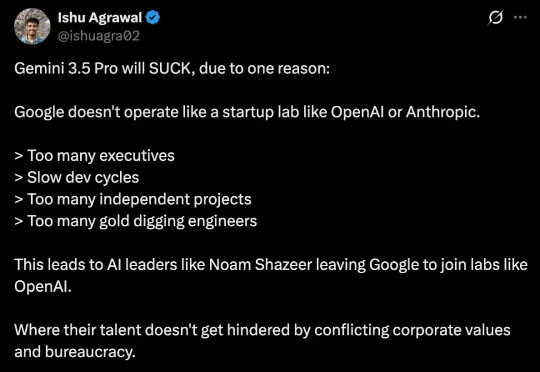
最近,谷歌连失两员大将。短短三天内,先是 Transformer 论文共同作者 Noam Shazeer 离开谷歌加入 OpenAI;紧接着诺贝尔奖得主、AlphaFold 负责人 John Jumper 转投 Anthropic 麾下。

如今,CameraSquad 的出现,让这种多视角一致的视频生成与 3D 世界状态构建成为现实。近日,中国科学院大学高林研究员团队联合卡迪夫大学、香港科技大学和快手可灵团队,提出了一种面向多轨迹并行生成的相机可控视频生成方法 CameraSquad [1],相关论文已被 ACM SIGGRAPH 2026 录用。
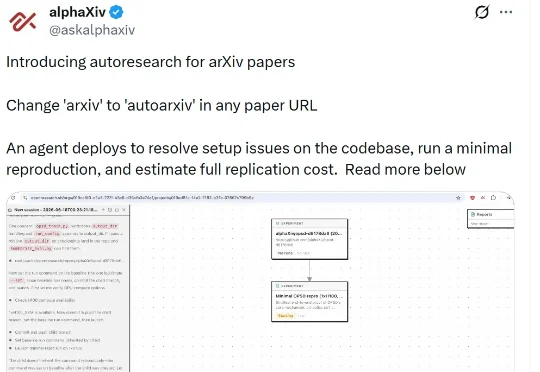
机器之心编辑部 AI 读论文这件事,正在进入下一个阶段。 最近,alphaXiv 推出了一个面向 arXiv 论文的 autoresearch 功能。 它的使用方式非常直接:当用户看到一篇论文时,只需要把论文 URL 里的「arxiv」改成「autoarxiv」,系统就会:
诺贝尔奖得主,入职Anthropic了!今天,AlphaFold核心领导者John Jumper官宣:离开工作近9年的Google DeepMind,加入Anthropic。用一个AI模型改写了整个结构生物学的诺奖得主,转身走了。

广州智跃深空人工智能科技有限公司 Zleap AI 提出的 SAG(SQL-Retrieval Augmented Generation) 出场了。其实,名字已经点题了——不是 Graph、Hippo,而是 SQL-Retrieval。它的核心想法是在离线阶段,SAG 先把原始文本先整理成「事项 + 实体」的数据库结构。等查询来了,再围绕当前问题,用 SQL 动态串出一张局部线索网。

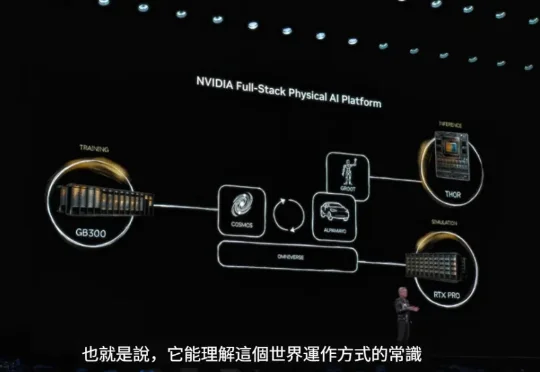
模型还不够完美,但机器人必须开始干活。Ferrata 想解决的,正是 Physical AI 从 Demo 走向真实现场之前,最缺的那层安全绳。

KOID是美股首支覆盖具身智能和Physical AI全生态的ETF,持仓50家公司,横跨美国、中国、日本、欧洲市场,目前持有16家中国公司(文末有清单)。KOID不仅押注人形机器人整机厂商,更侧重上游零部件、芯片等核心资产,整体投资思路是复刻“卖铲子”和“卡脖子”逻辑。