空间具身通用操作模型!百万真实数据训练,预训练代码全开源 | 上海AI Lab/TeleAI/上科大等团队新作
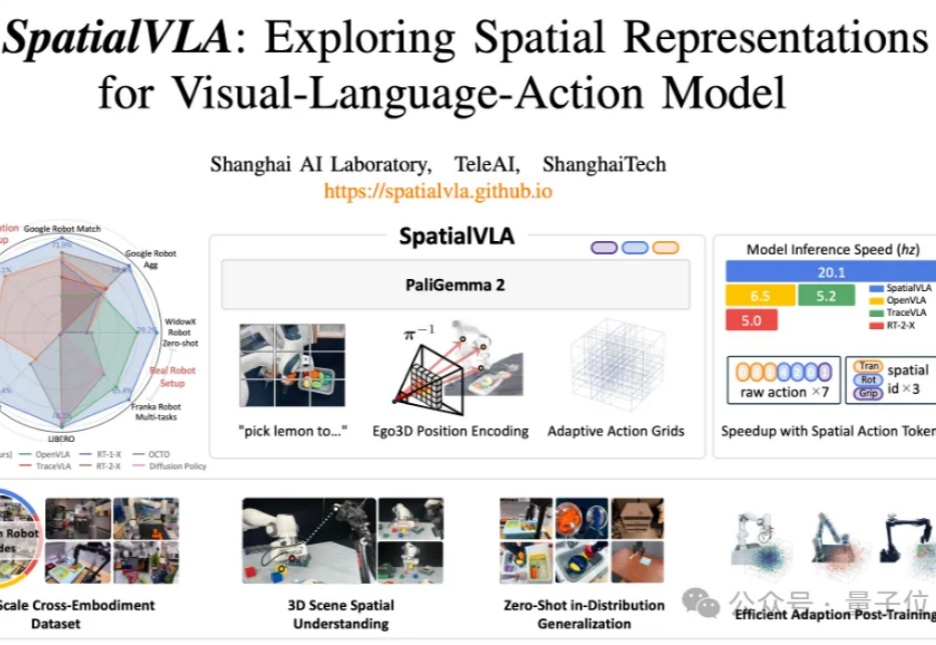
空间具身通用操作模型!百万真实数据训练,预训练代码全开源 | 上海AI Lab/TeleAI/上科大等团队新作与3D物理环境交互、适应不同机器人形态并执行复杂任务的通用操作策略,一直是机器人领域的长期追求。
来自主题: AI技术研报
6026 点击 2025-03-05 13:46
 搜索
搜索
与3D物理环境交互、适应不同机器人形态并执行复杂任务的通用操作策略,一直是机器人领域的长期追求。