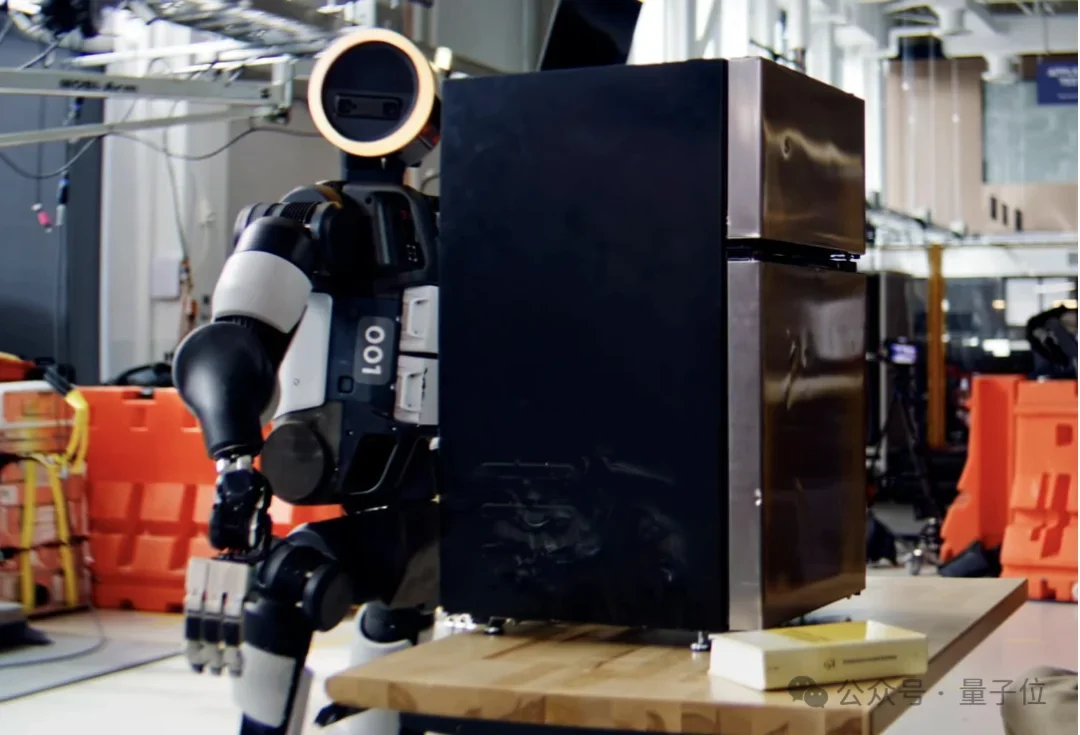
机器人搬冰箱成了!洗碗之后又一痛点,网友:解放我的髋关节
机器人搬冰箱成了!洗碗之后又一痛点,网友:解放我的髋关节什么拧螺丝、叠衣服、左勾拳右勾拳,都太常规操作了!
来自主题: AI资讯
6654 点击 2026-05-20 10:15
 搜索
搜索
什么拧螺丝、叠衣服、左勾拳右勾拳,都太常规操作了!
前北京人形数据负责人创业,给出即插即用的灵巧操作方案。
没有新的GPU,没有新的智算卡。

刚刚,一场人类尊严保卫战以险胜告终。

2026 年 5 月,深度机智(DeepCybo)迎来成立一周年。

中国具身智能赛道,最近出现了一个越来越清晰的现象。
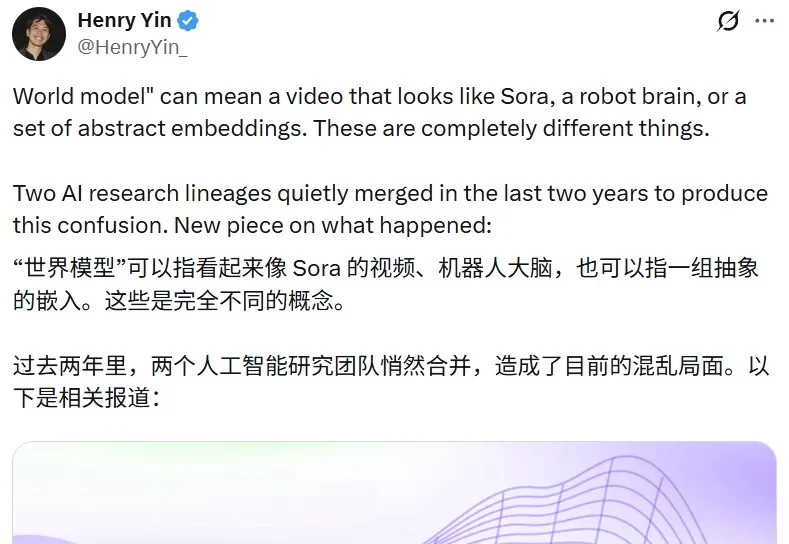
世界模型(World Model),想必你已经在很多场合听过这个术语了。它有时出现在视频生成领域,有时又出现在具身智能领域;它们的含义还有所差别,甚至看起来像是完全不同的概念。

消费级机器人行业,可能要出现一次真正意义上的代际切换了。
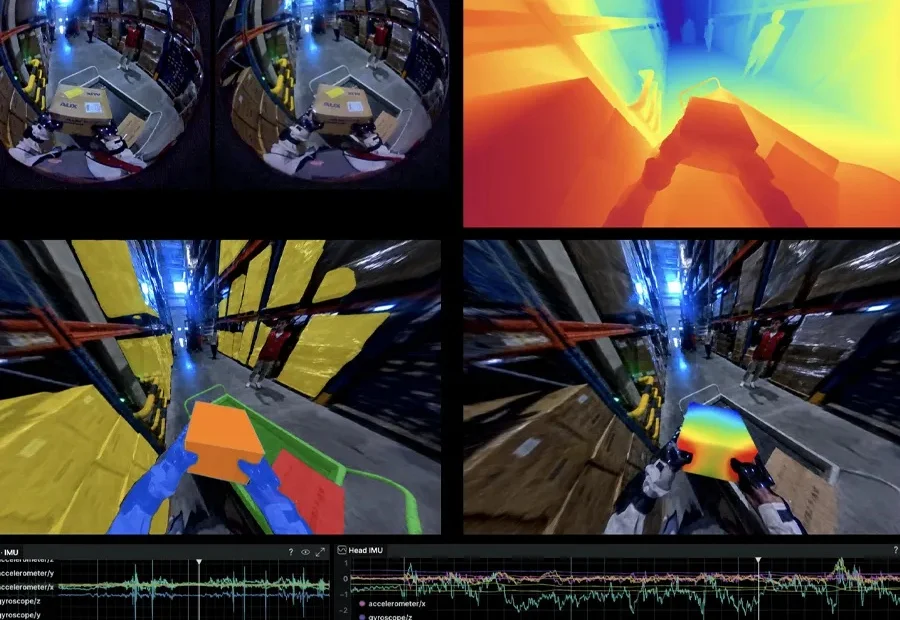
最近,全球的网民都化身「监工」,围观了 Figure AI 的人形机器人直播在物流传送带上连续几十个小时,不间断地分拣包裹。
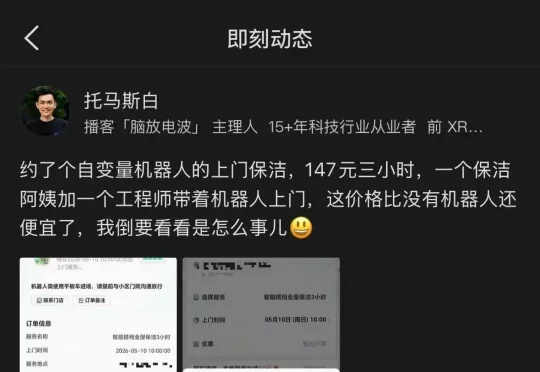
花 149 块钱,能买到什么级别的保洁服务?答:一个阿姨 + 一个工程师 + 一台重逾百公斤的盘式机器人,上门服务三小时。这个配置放在 58 到家的订单页上,一度让人怀疑是不是系统 Bug,少了打了一个零?