
RoboTwin原班团队再下场,构建具身评测珠峰
RoboTwin原班团队再下场,构建具身评测珠峰曾推出 RoboTwin 系列基准的团队发布了 RoboDojo,一套统一覆盖仿真与真实机器人操作的具身智能评测体系。它包含 42 个仿真任务、18 个真实机器人任务,并将 30 个代表性机器人策略放到同一套标准下比较。
来自主题: AI技术研报
8689 点击 2026-07-18 10:08
 搜索
搜索
曾推出 RoboTwin 系列基准的团队发布了 RoboDojo,一套统一覆盖仿真与真实机器人操作的具身智能评测体系。它包含 42 个仿真任务、18 个真实机器人任务,并将 30 个代表性机器人策略放到同一套标准下比较。

7 月 17 日,2026 世界人工智能大会在上海开幕。展览首次扩展至「三地四馆」,总面积超过 10 万平方米,1100 余家企业带来 3000 余项展品,其中超过 300 款产品在大会期间全球首发。智算与具身智能首次成为并列的核心赛道,各自聚集超过 200 家企业。从开展后的排队人流,到机器人展台前层层举起的手机,AI 依然是当下关注度最高的科技议题之一。

数亿美金,竟输给了一台相机?
8万块积木,15个小时!
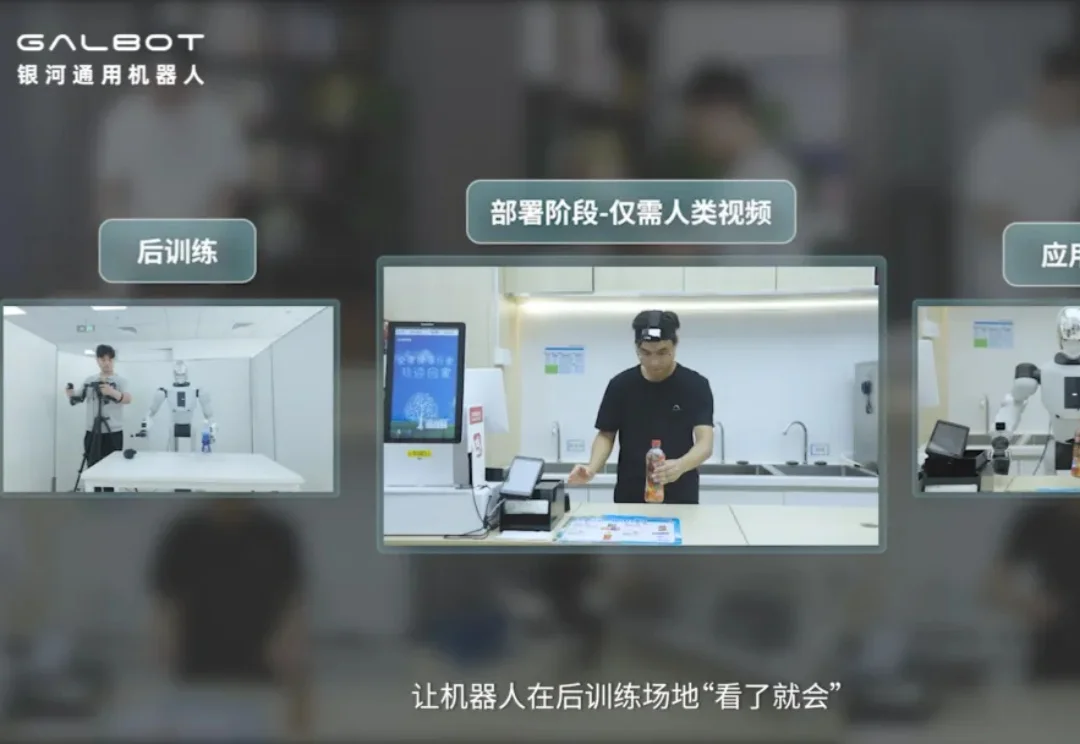
终于,现学现用的风也是吹到了具身智能。
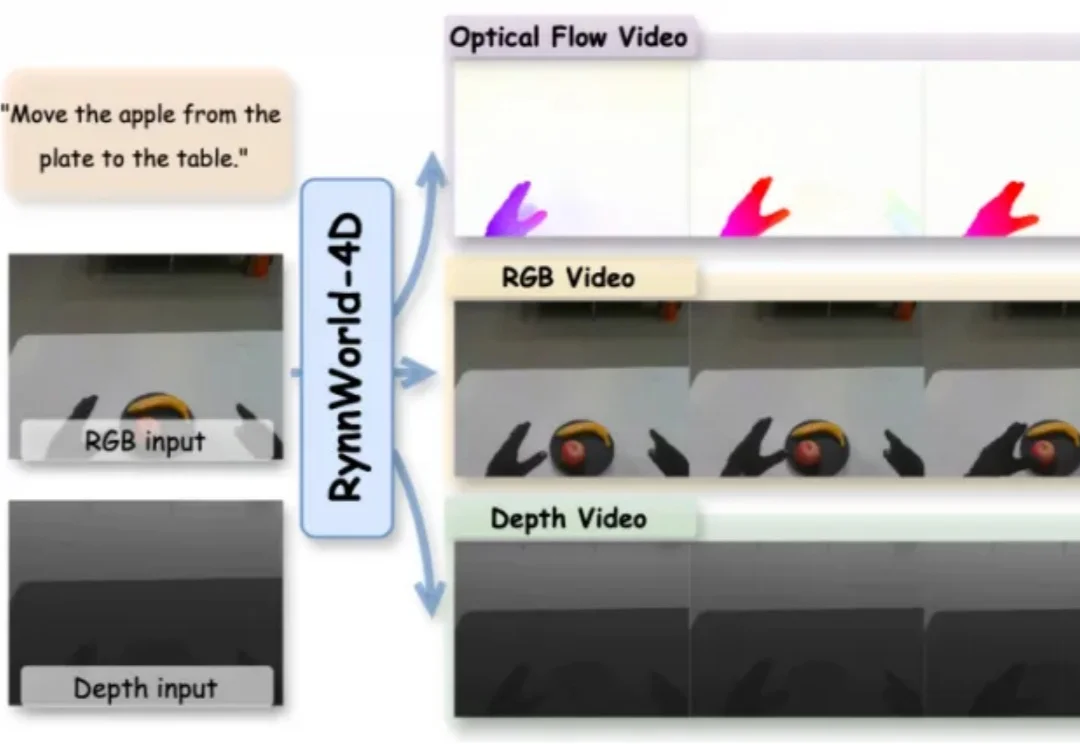
近两年,视频生成模型在具身智能领域受到持续关注。从 UniPi、SuSIE 到各类 action-conditioned video generation 变体,其核心思路一致:先由模型生成一段未来视频,再从中提取动作信号供机器人执行。

今天,小米刚刚扔出一颗“深水炸弹”——Xiaomi-Robotics-1具身基座模型,试图改变这一局面。Xiaomi-Robotics-1基于10万小时真实世界操作轨迹进行预训练,再用约1.1万小时跨本体数据完成后训练。据悉,这是国内首次在机器人策略模型中,对Scaling Law进行较为完整的系统验证。
大家好,我是瓦力,具身算法研究员。 我有个习惯,隔三差五都会去 PI 的官网刷一下,看他有没有新东西。最近这三个月,官网主页是一动没动,停在四月的 π0.7。
7 月 15 日,腾讯 Robotics X 实验室以及福田实验室联合腾讯混元推出两款具身智能基座模型 —— 具身 VLM 基座模型 Hy-Embodied-VLM-1.0 以及 具身世界认知基座模型 Hy-Embodied-RxBrain-1.0,不仅让具身大脑能够 “看” 懂现实世界,还学会同时推理和想象。

昨天刚完成2亿美元Pre-IPO轮融资,逐际动力没有急着讲资本故事,而是立马甩出一段全尺寸人形机器人Oli全自主做家务的视频: