

北大92后,银河通用一把融资21亿
北大92后,银河通用一把融资21亿宇树科技和智元机器人争夺春晚门票时,有人却在默默刷新行业融资纪录。银河通用宣布,完成超过3亿美元(约合人民币21亿元)C轮融资。3亿美元,刷新了通用智能机器人领域的单轮融资纪录。至此,银河通用累计融资接近8亿美元,最新估值升至30亿美元,成为国内估值最高的通用智能机器人初创公司。
来自主题: AI资讯
8221 点击 2025-12-24 11:45
宇树科技和智元机器人争夺春晚门票时,有人却在默默刷新行业融资纪录。银河通用宣布,完成超过3亿美元(约合人民币21亿元)C轮融资。3亿美元,刷新了通用智能机器人领域的单轮融资纪录。至此,银河通用累计融资接近8亿美元,最新估值升至30亿美元,成为国内估值最高的通用智能机器人初创公司。
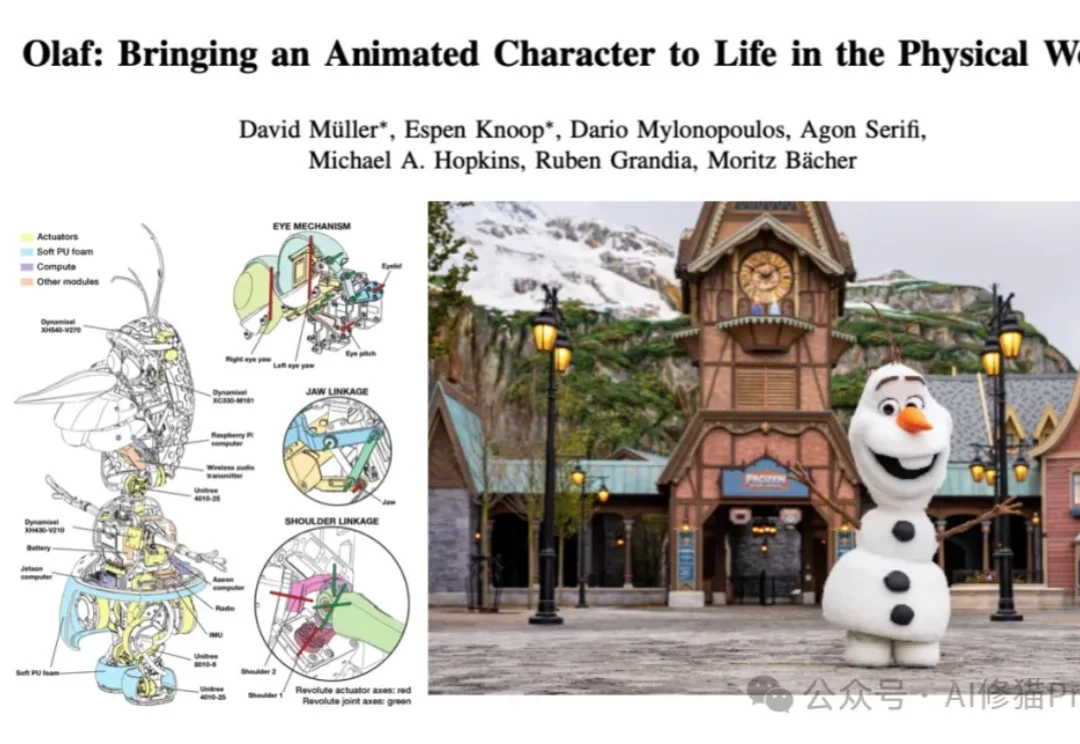
还记得之前非常火的雪宝Olaf机器人吗?

硬氪获悉,具身智能机器人公司飒智智能近期连续完成A++轮及A+++轮融资,累计金额达数亿元。我们总结了最新两轮融资信息和该公司几大亮点:

坏事儿了,中国Kung fu,好像真被机器人学走了!摊手、膀手、伏手、挥拳,一套咏春拳下来,我当场愣住,妥妥机器人届的叶问啊:这个手脚灵活到有点过分的小小机器人,正是逐际动力推出的多形态具身机器人TRON 2,起售价4.98万元,即日起正式开启预售。

起猛了,怎么在演唱会看到人形机器人跳「韦伯斯特」了! 真就一个大写的「Wow」!12 月 18 日,在王力宏「最好的地方」巡回演唱会成都站现场,六台人形机器人随《火力全开》歌曲登台与歌手及舞者同台表演。

2025年最受资本热捧的具身智能初创公司,在2025年年终完成了“首秀”。它石智航,成立不到1年拿了17亿元融资后,刚刚交卷,举行了首次技术发布会。而它石的首秀,也是通过“绣”展现的——
具身智能通往通用性的征途,正被 “数据荒漠” 所阻隔。当模型在模拟器中刷出高分,却在现实复杂场景中频频 “炸机” 时,行业开始反思:我们喂给机器人的数据,是否真的包含人类操作的精髓?近日,深度机智在以人类第一视角为代表的真实情境数据,筑牢物理智能基座,解决具身智能通用性难题的道路上又有重要举措。

视觉–语言–动作(VLA)模型在机器人场景理解与操作上展现出较强的通用性,但在需要明确目标终态的长时序任务(如乐高搭建、物体重排)中,仍难以兼顾高层规划与精细操控。

科技赛道从不缺“造梦者”,但能精准击中行业痛点的“破局者”往往寥寥。

生成式模型正在成为机器人和具身智能领域的重要范式,它能够从高维视觉观测中直接生成复杂、灵活的动作策略,在操作、抓取等任务中表现亮眼。但在真实系统中,这类方法仍面临两大「硬伤」:一是训练极度依赖大规模演示数据,二是推理阶段需要大量迭代,动作生成太慢,难以实时控制。