
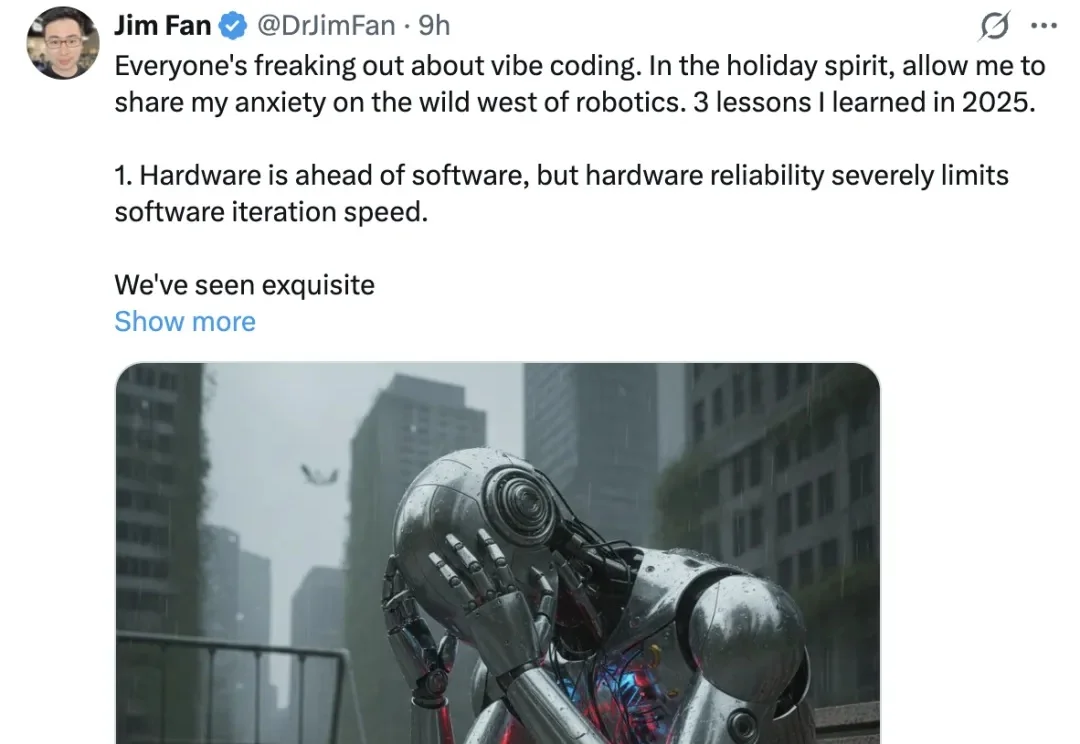
具身智能机器人年度总结,来自英伟达机器人主管
具身智能机器人年度总结,来自英伟达机器人主管“机器人领域仍处于蛮荒时代。”
来自主题: AI资讯
9659 点击 2025-12-31 10:33
“机器人领域仍处于蛮荒时代。”
AI算力焦虑可能搞错方向了?黄仁勋直指能效才是上限。
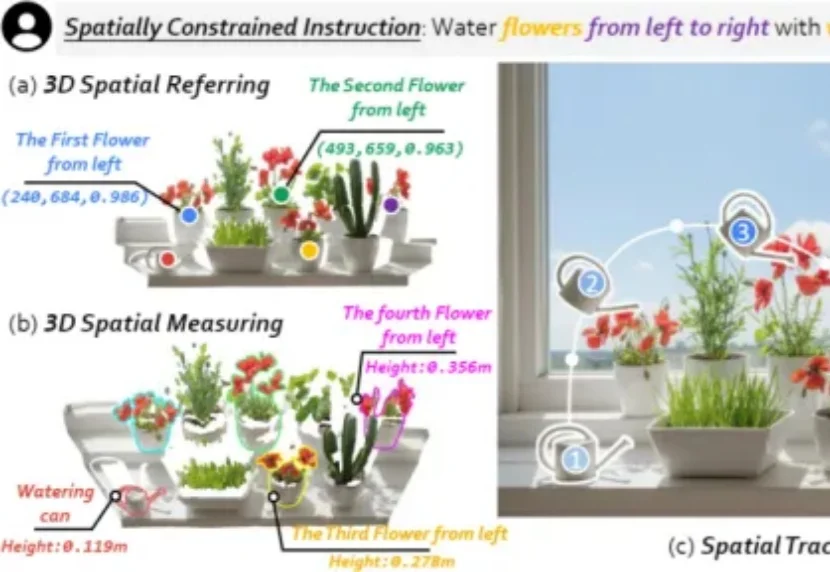
我们希望具身机器人真正走进真实世界,尤其走进每个人的家里,帮我们完成浇花、收纳、清洁等日常任务。但家庭环境不像实验室那样干净、单一、可控:物体种类多、摆放杂、随时会变化,这让机器人在三维物理世界中「看懂并做好」变得更难。
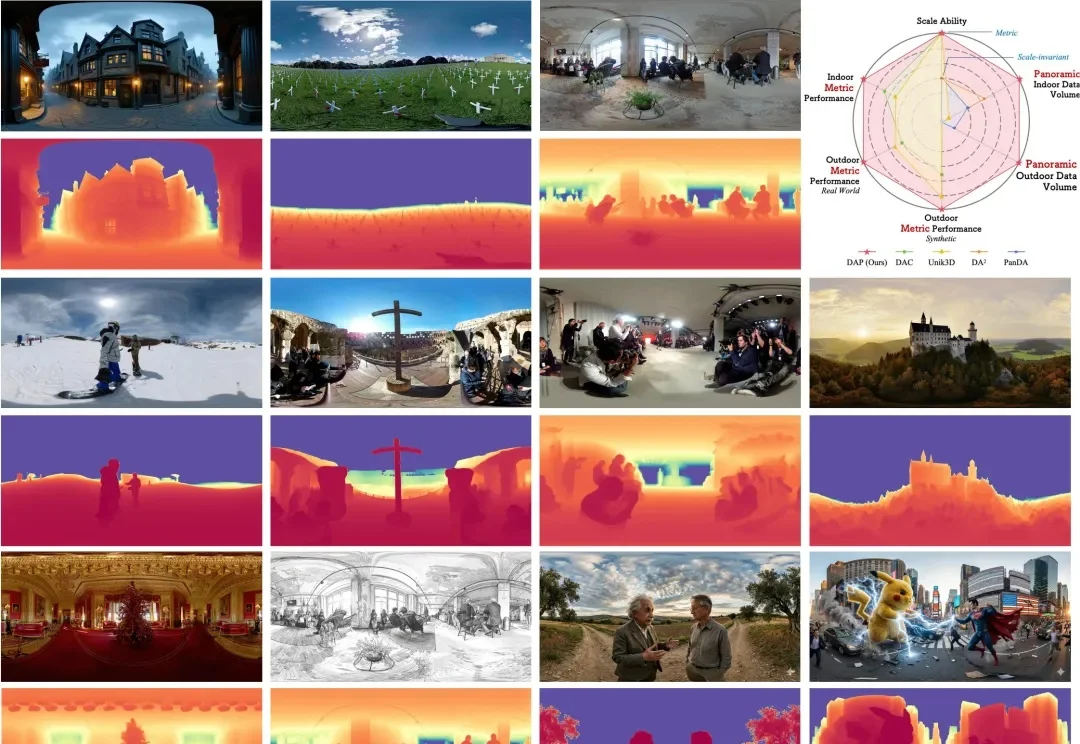
在空间智能(Spatial Intelligence)飞速发展的今天,全景视角因其 360° 的环绕覆盖能力,成为了机器人导航、自动驾驶及虚拟现实的核心基石。然而,全景深度估计长期面临 “数据荒” 与 “模型泛化差” 的瓶颈。
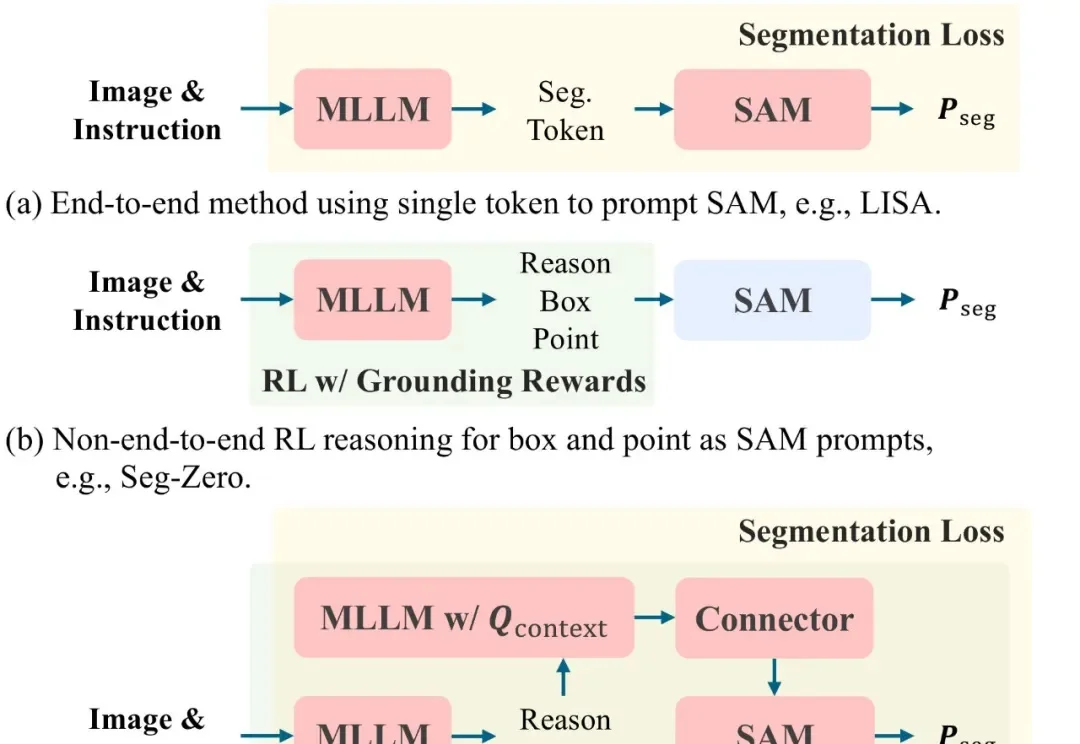
文本提示图像分割(Text-prompted image segmentation)是实现精细化视觉理解的关键技术,在人机交互、具身智能及机器人等前沿领域具有重大的战略意义。这项技术使机器能够根据自然语言指令,在复杂的视觉场景中定位并分割出任意目标。

具身智能是2025年的最大的“泡沫”吗?年初,宇树突然放大招,发布了5900美元的R1人形机器人。要知道,就在一年前,业内普遍认为人形机器人的成本底线还在2到3万美元,宇树这一招,相当于把整个行业的价格预期直接打碎。
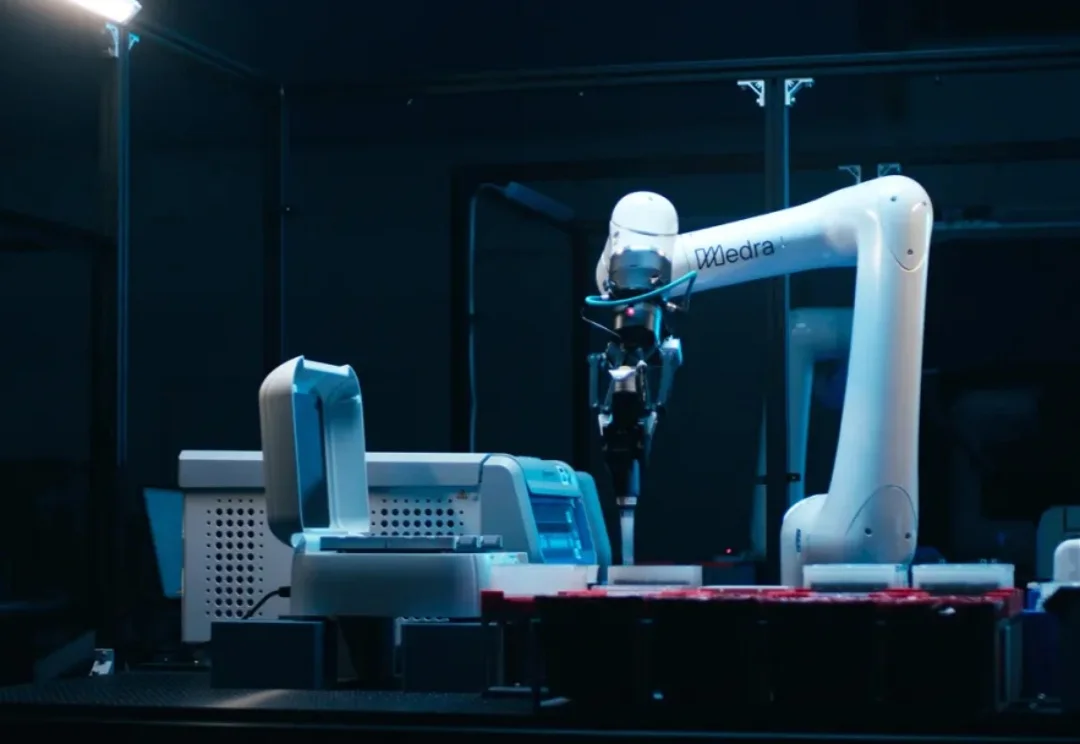
近日,AI机器人初创Medra宣布完成了5200万美元A轮融资,加上先前筹集的1100万美元,总融资达到6300万美元(约合人民币4.4亿元)。

不知道你有没有刷到过一条视频,陪伴6岁小女孩的AI机器人被摔坏了。
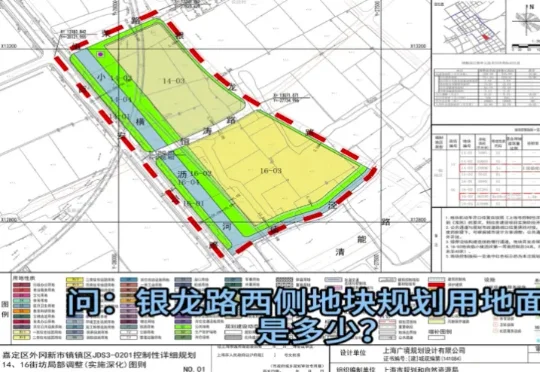
近日,由上海市规划资源局与商汤大装置联合打造的全国规划资源领域首个基础大模型“云宇星空大模型”(专业版)上线。这并非一个简单的对话机器人,而是一个6000亿参数、深度嵌入规资全业务系统的行业大模型:它能调取地图、做统计,能理解规划图纸、会写报告,覆盖从知识检索、空间分析到决策支撑的完整工作闭环。

CyboPal ONE 尝试告诉用户,未来硬件不应只是被动、静止的容器,而应是具有‘代理权(Agency)’的主动生命体。”