

挪威版“宇树”刷屏:人形机器人进工厂是伪命题,干家务才是正路
挪威版“宇树”刷屏:人形机器人进工厂是伪命题,干家务才是正路“造人”难,“卖人”更难。
来自主题: AI资讯
7820 点击 2025-03-04 11:17
“造人”难,“卖人”更难。

据众擎机器人介绍,众擎机器人SE01自主研发的“动态重心补偿算法”以每秒1000次的姿态微调对抗前倾失控风险;仿生肌肉驱动系统使关节瞬时扭矩高达330N·m;而毫米波雷达与视觉融合感知系统则将落地误差控制在±2cm内。

全球人形机器人,哪家强?
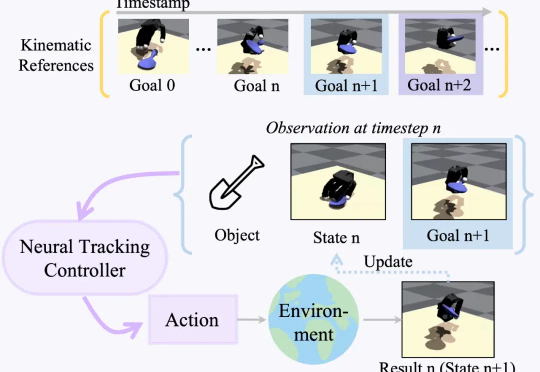
现实世界的机器人距离科幻小说里的机器人世界还有多远?通用灵巧操控何时才能实现?朝着这一伟大的目标,研究通用灵巧操控轨迹跟踪的 DexTrack 便应用而生。
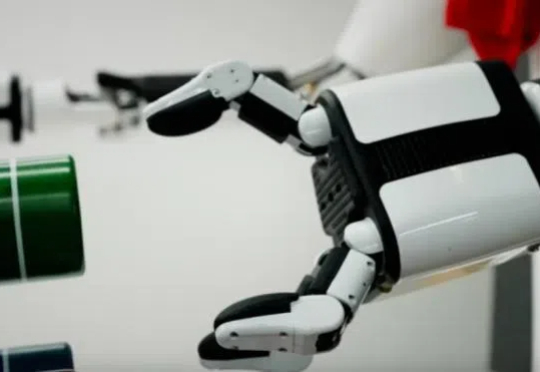
从炫技走向应用,“灵巧手”成机器人关键拼图

机器人行业的ChatGPT时刻、iPhone时刻,正在加速到来。
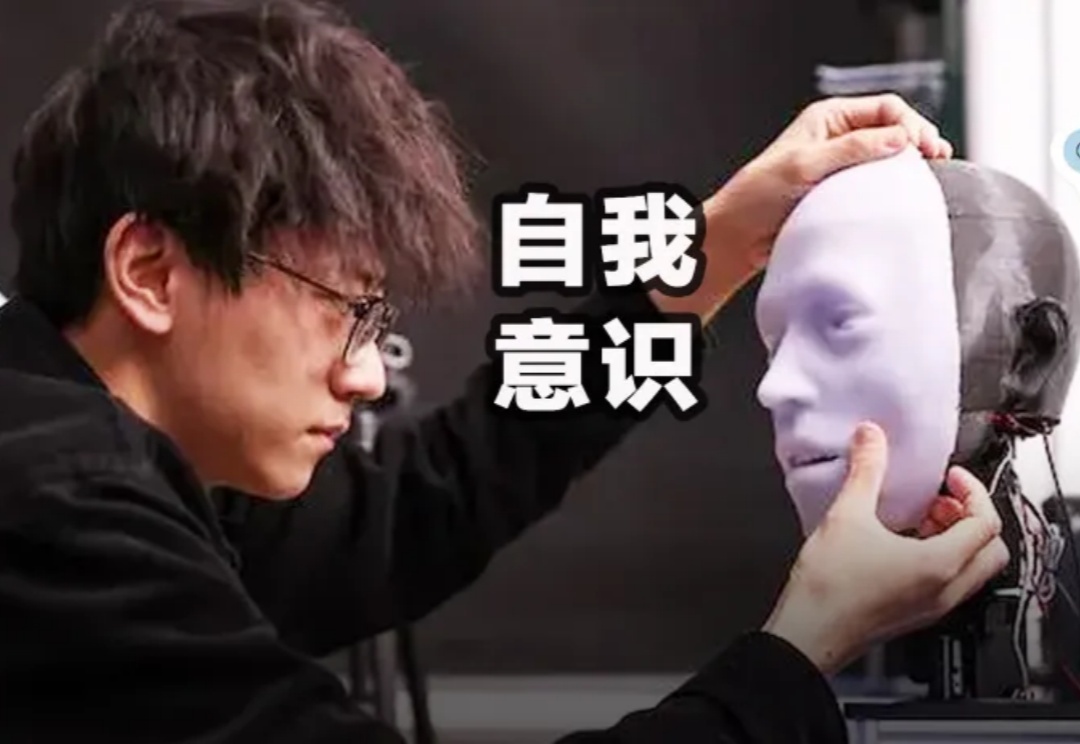
近日,来自哥大的研究人员开发出了一种新AI系统,让机器人通过普通摄像头和深度神经网络实现自我建模、运动规划和自我修复,突破了传统机器人依赖工程师调整的局限,使机器人能像人类一样自主学习和适应环境变化,为具身智能发展带来新范式。
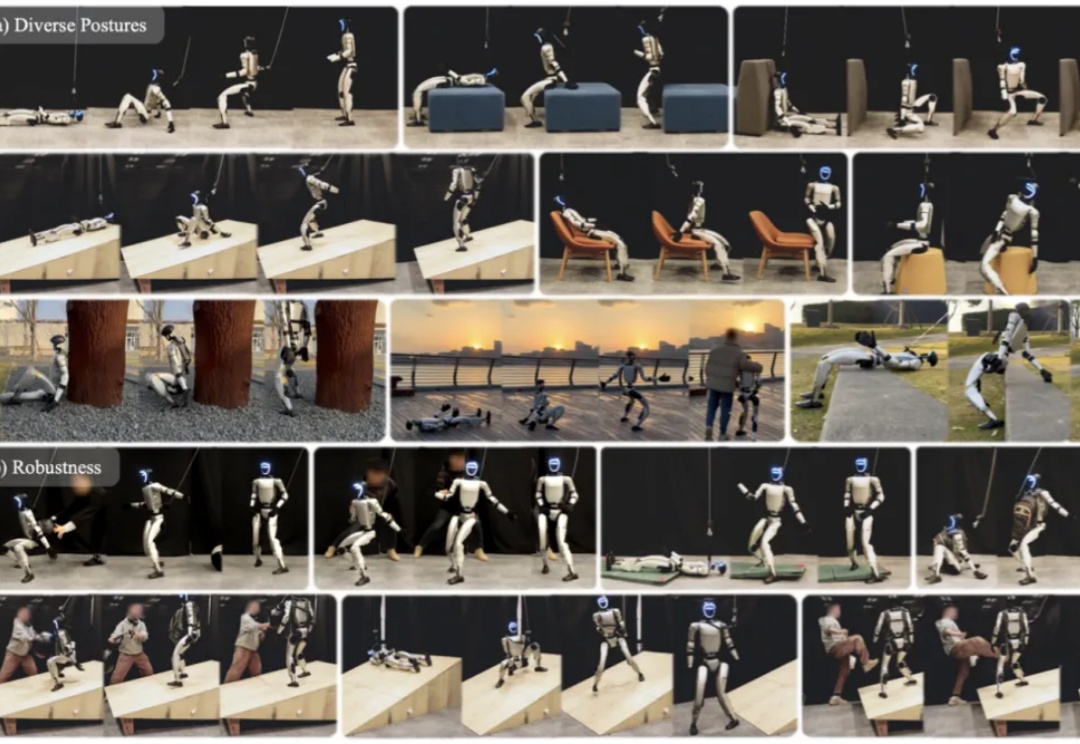
近日,上海 AI Lab 具身智能中心研究团队在机器人控制领域取得了最新突破,提出的 HoST(Humanoid Standing-up Control)算法,成功让人形机器人在多种复杂环境中实现了自主站起,并展现出强大的抗干扰能力。
其实,这个话题我也不好意思开口,去年7月的时候我就关注过这个 AI情趣娃娃;在具身智能发展成熟时,表情陪伴人形机器人有望成为主流产品形态。表情陪伴人形机器人属情绪陪伴机器人高端领域,指的是硅胶皮肤覆盖,根据仿生学原理模仿人的外观设计、能够与人类进行自然交互的人形机器人。
大雄:(趴在书桌前抓头发)哆啦 A 梦!今天的作文题目是《未来的机器人》,可是我要写800字!写不完啦!哆啦 A 梦:(得意叉腰)别担心!我刚从22世纪带来了「超高效作业处理器」——FlashMLA 魔盒!它能让写作文像吃铜锣烧一样快哦!