
OpenAI内部大重组!模型行为团队并入Post Training,负责人另起炉灶
OpenAI内部大重组!模型行为团队并入Post Training,负责人另起炉灶OpenAI又要成立新团队了!
来自主题: AI资讯
8896 点击 2025-09-08 17:19
OpenAI又要成立新团队了!
继π0后,具身智能基座模型在中国也终于迎来了真正的开源—— 刚刚,WALL-OSS宣布正式开源!在多项指标中,它还超越了π0。如果你是搞具身的开发者,了解它的基本资料,你就一定不会想错过它:

好玩好用的明星视频生成产品再更新,用户操作基础,模型技术就不基础。
经历了前段时间的鸡飞狗跳,扎克伯格的投资似乎终于初见成效。
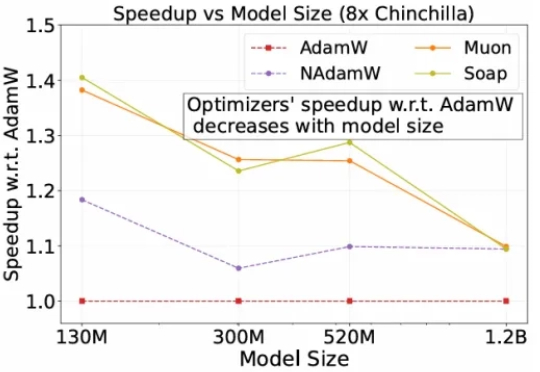
自2014 年提出以来,Adam 及其改进版 AdamW 长期占据开放权重语言模型预训练的主导地位,帮助模型在海量数据下保持稳定并实现较快收敛。
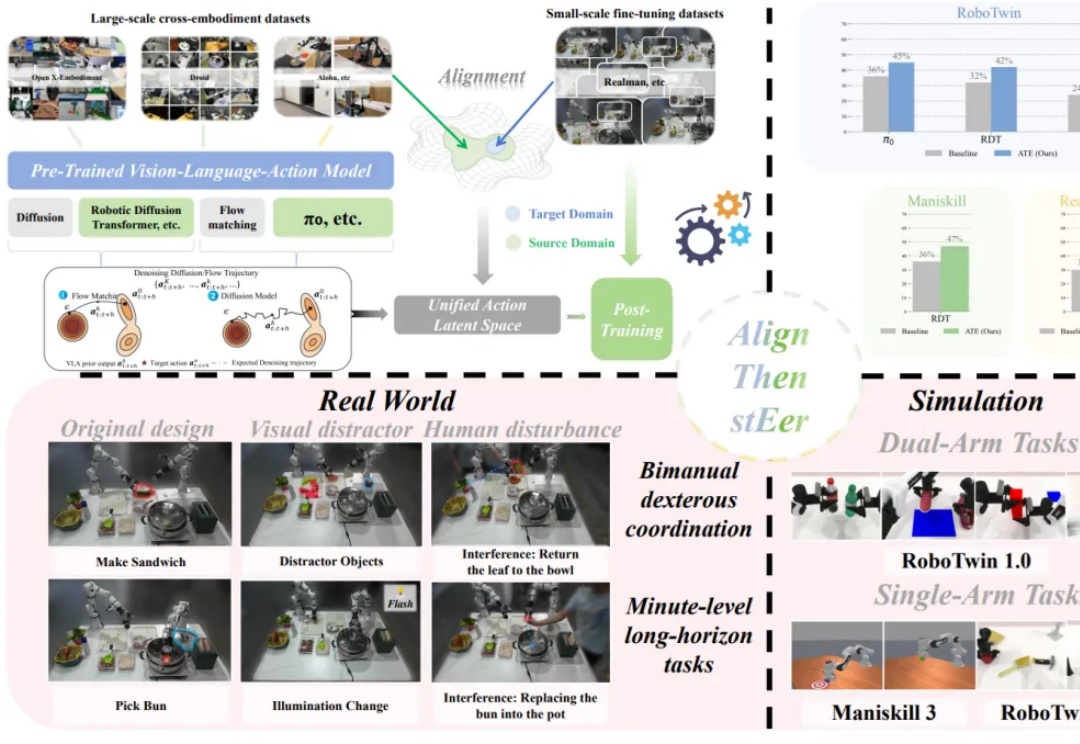
在多模态大模型的基座上,视觉 - 语言 - 动作(Visual-Language-Action, VLA)模型使用大量机器人操作数据进行预训练,有望实现通用的具身操作能力。

用模型学习模型,为企业主生产更容易被AI推荐的营销内容。

苹果在 Hugging Face上放大招了!这次直接甩出两条多模态主线:FastVLM主打「快」,字幕能做到秒回;MobileCLIP2主打「轻」,在 iPhone 上也能起飞。更妙的是,模型和Demo已经全开放,Safari网页就能体验。大模型,真·跑上手机了。
AI界奥数杯,重启了!OpenAI o3首次杀入赛场,在算力拉满的情况下,直接以最高47分的逆天成绩炸翻全场。值得一提的是,前五模型合并得分仅与o3差5分,开源与闭源差距再次缩小。
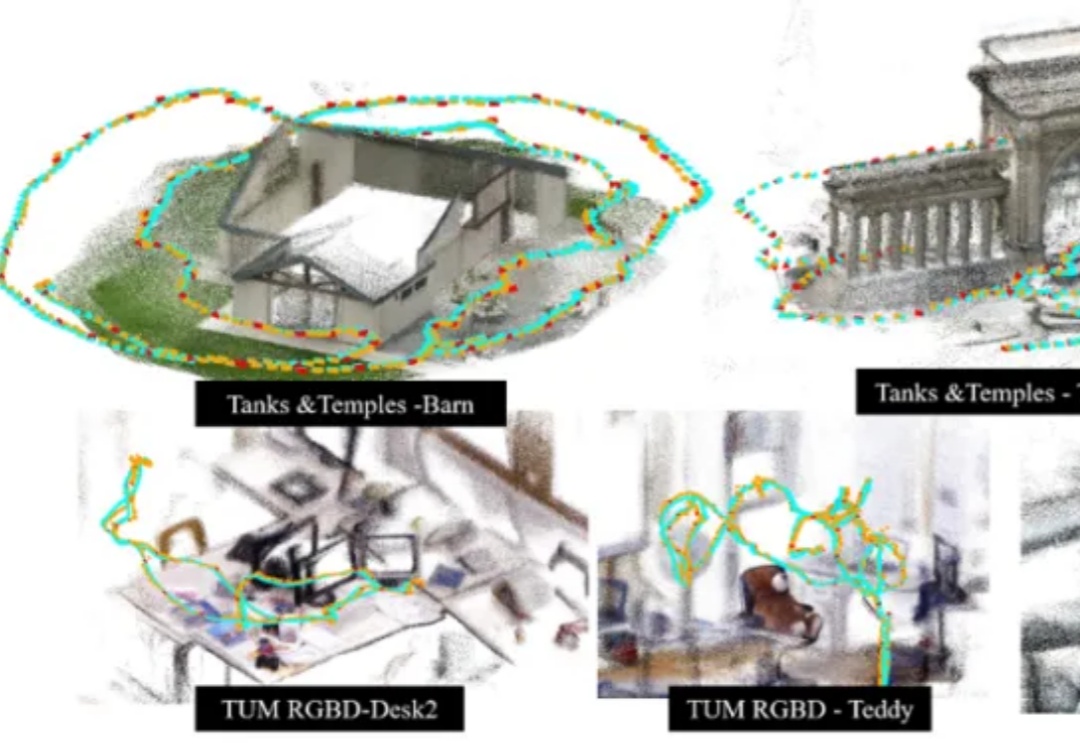
香港科技大学谭平教授团队与地平线(Horizon Robotics)团队最新发布了一项 3D 场景表征与大规模重建新方法 SAIL-Recon,通过锚点图建立构建场景全局隐式表征,突破现有 VGGT 基础模型对于大规模视觉定位与 3D 重建的处理能力瓶颈,实现万帧级的场景表征抽取与定位重建,将空间智能「3D 表征与建模」前沿推向一个新的高度。