从「说错话」到「干错事」:复旦、CityUHK、SMU、UIUC等13家机构联合发布「具身智能安全」综述
从「说错话」到「干错事」:复旦、CityUHK、SMU、UIUC等13家机构联合发布「具身智能安全」综述具身智能(Embodied AI)正在快速从实验室走向真实世界。
来自主题: AI技术研报
8543 点击 2026-05-25 14:45
 搜索
搜索
具身智能(Embodied AI)正在快速从实验室走向真实世界。
刚刚的,面壁智能联合 OpenBMB 搞了个端侧开源周。今天作为开源周的第一天,端出来的是个好东西 BitCPM-CANN,模型权重只需要约 200 MB 的内存,手表也够跑

刚刚完成新一轮亿元融资的具脑磐石,从成立之初押注的正是这个方向。具脑磐石由朱森华创立。他曾任华为云AI算法创新Lab主任,主导过AI脑科学云平台、盘古具身大模型、全球具身智能产业创新中心等系统级项目。在业内,他被称为“华为具身大脑一号位”。
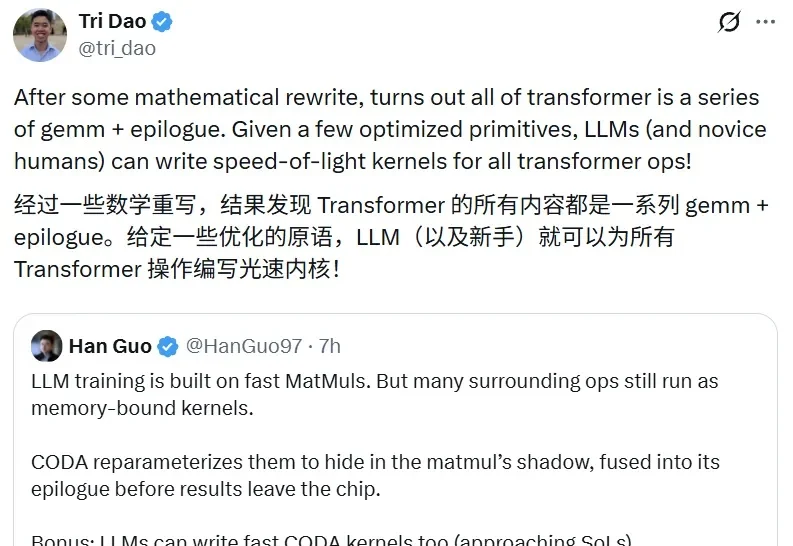
5 月 22 日,Tri Dao 在社交媒体上转发了 Han Guo 的一条推文。他还写道:「经过一些数学重写,结果发现 Transformer 的所有内容都是一系列 GEMM + epilogue(矩阵乘法加尾声)。给定一些优化的原语,LLM(以及新手)就可以为所有 Transformer 操作编写光速内核!」

近日,Meta 曝光的一段内部录音显示: 公司为了训练大模型,正通过监控工具监视员工在电脑上的鼠标和键盘操作。

智象未来正式发布基于新一代原生全模态模型架构 Unified Transformer(UiT)打造的图像大模型 HiDream-O1-Image-Pro。这一超2千亿参数的原生全模态图像大模型,不仅在多个基准测试中刷新 SOTA 纪录,也标志着智象未来正向图像、视频、文本、音频等多模态统一建模的“原生全模态”阶段迈进。

世界模型是个依然模糊和遥远的概念。
当前,测试时扩展范式普遍致力于增加推理长度。然而,已有研究表明,随着推理长度的持续增长,以垂直扩展为核心的计算范式容易陷入探索僵化等问题。因此,从另一维度拓展推理的宽度显得尤为重要。K2.5、Step3-VL 和 LongCat-Flash-Thinking 等模型已在推理宽度方面开展了有益的探索。
前谷歌DeepMind研究员离职并发表长文指出AI行业当前最被低估的瓶颈。他认为,现有的基准测试和安全评估都隐含假设下一代模型只是当前模型的增强版,但如果模型跨入全新能力区间,整个评估基础设施将悄然崩溃。
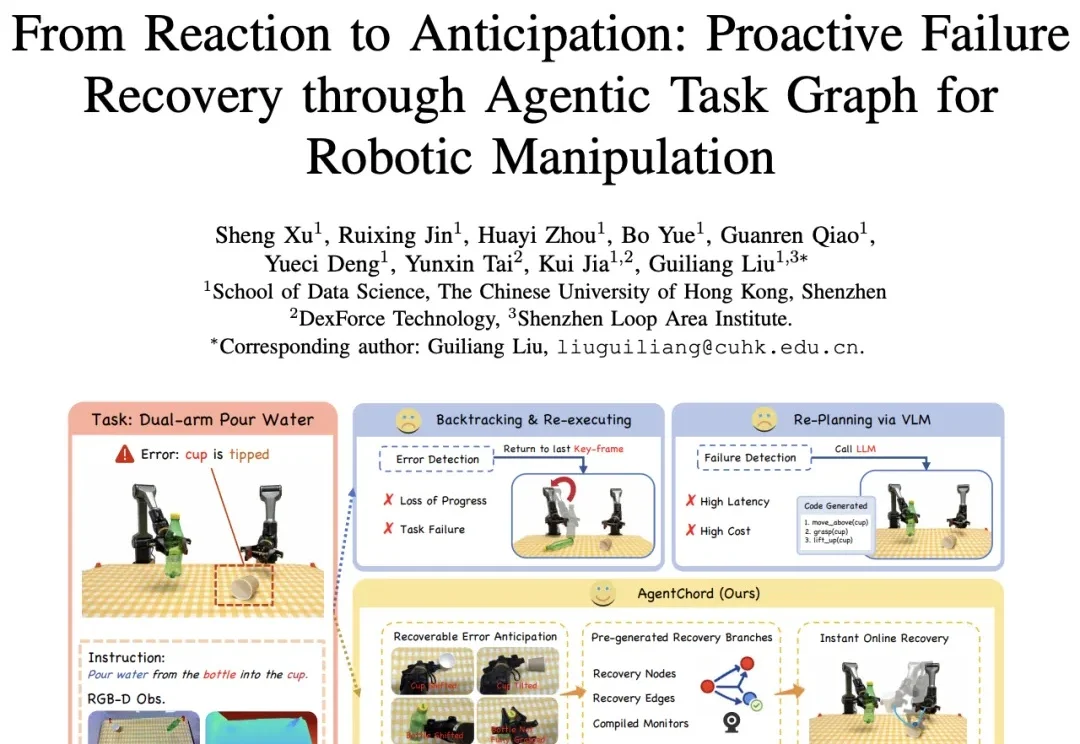
机器人操作正在从结构化工业场景走向更开放的真实环境。相比完成单个预设动作,真实任务往往包含更长的执行链条、更复杂的物体交互,以及更多不可控的外部扰动。一次抓取没有完全夹稳、目标物体被轻微碰偏、双臂交接时姿态出现偏差,都可能让后续步骤偏离原本计划。