LLM-in-Sandbox:给大模型一台电脑,激发通用智能体能力
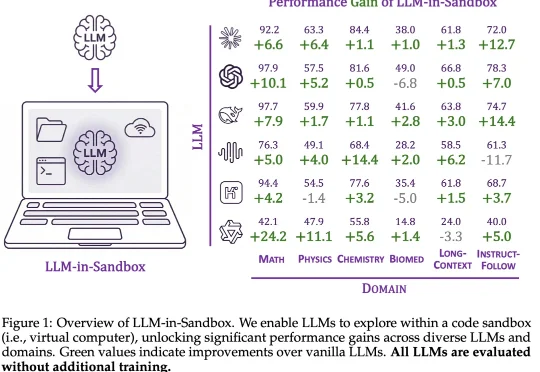
LLM-in-Sandbox:给大模型一台电脑,激发通用智能体能力大模型的能力正在被不同的范式逐步解锁:In-Context Learning 展示了模型无需微调即可泛化到新任务;Chain-of-Thought 通过引导模型分步推理来提升复杂问题的求解能力;近期,智能体框架则赋予模型调用工具、多轮交互的能力。
来自主题: AI技术研报
11010 点击 2026-01-30 16:05
 搜索
搜索
大模型的能力正在被不同的范式逐步解锁:In-Context Learning 展示了模型无需微调即可泛化到新任务;Chain-of-Thought 通过引导模型分步推理来提升复杂问题的求解能力;近期,智能体框架则赋予模型调用工具、多轮交互的能力。
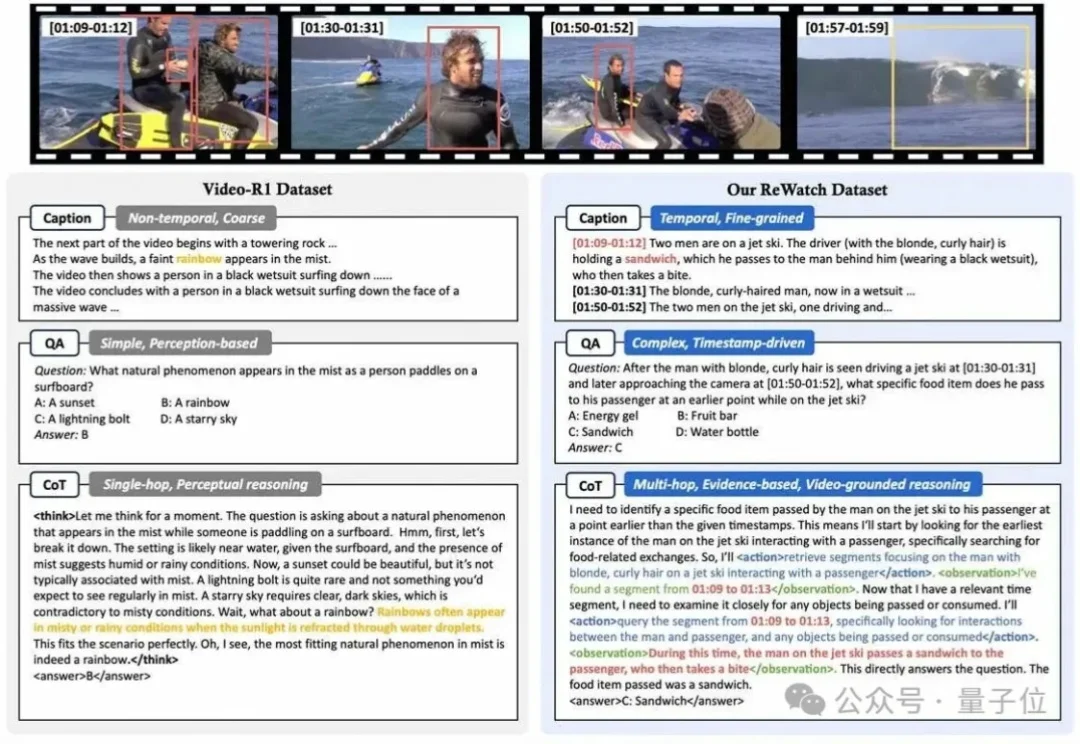
为什么让多模态大模型“一步一步思考”(”Let’s think step by step”)来回答视频问题,效果有时甚至还不如让它“直接回答”?

五个真实物理任务实测,PhysMaster 可推导、写码、数值验证。

大模型的出现,给许多行业带来了颠覆性的改变,运维这个向来被视为稳定、保守的领域也不例外。虽然“AIOps”这个概念早在 2016 年由 Gartner 提出,但早期的智能运维更多是利用大数据和机器学习对传统运维流程进行效率上的提升。
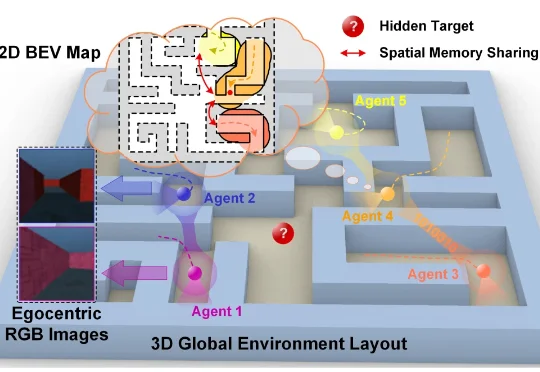
近日,香港城市大学博士生方政儒和所在团队让一群智能体在虚拟迷宫里共同探索,只给它们一个极其简单的目标——那就是学会预测同伴下一秒会看到什么以及会走到哪里。结果发现这些智能体不仅学会了高效合作,还在自己的“大脑”里自发形成了类似动物大脑中的“地图细胞”,甚至发明了一套只有它们才懂的秘密语言。
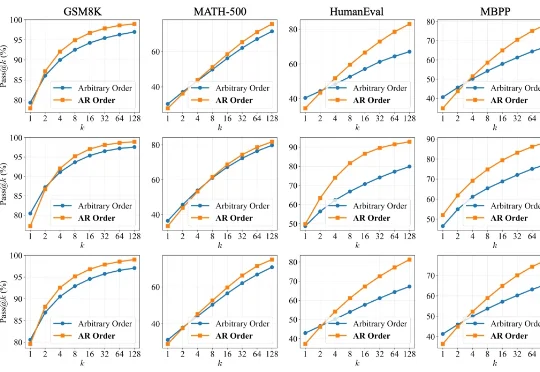
扩散语言模型(Diffusion LLMs, dLLMs)因支持「任意顺序生成」和并行解码而备受瞩目。直觉上,打破传统自回归(AR)「从左到右」的束缚,理应赋予模型更广阔的解空间,从而在数学、代码等复杂任务上解锁更强的推理潜力。
为什么在LLM推理能力大幅跃升的2026,我们依然只有AI Copilot而没有AI Teammate?尽管AI编程工具遍地开花,但不管是Claude Code还是Codex,本质上仍是“单Agent开发”或“主从控制”架构。而“AI结对编程”迟迟无法落地?
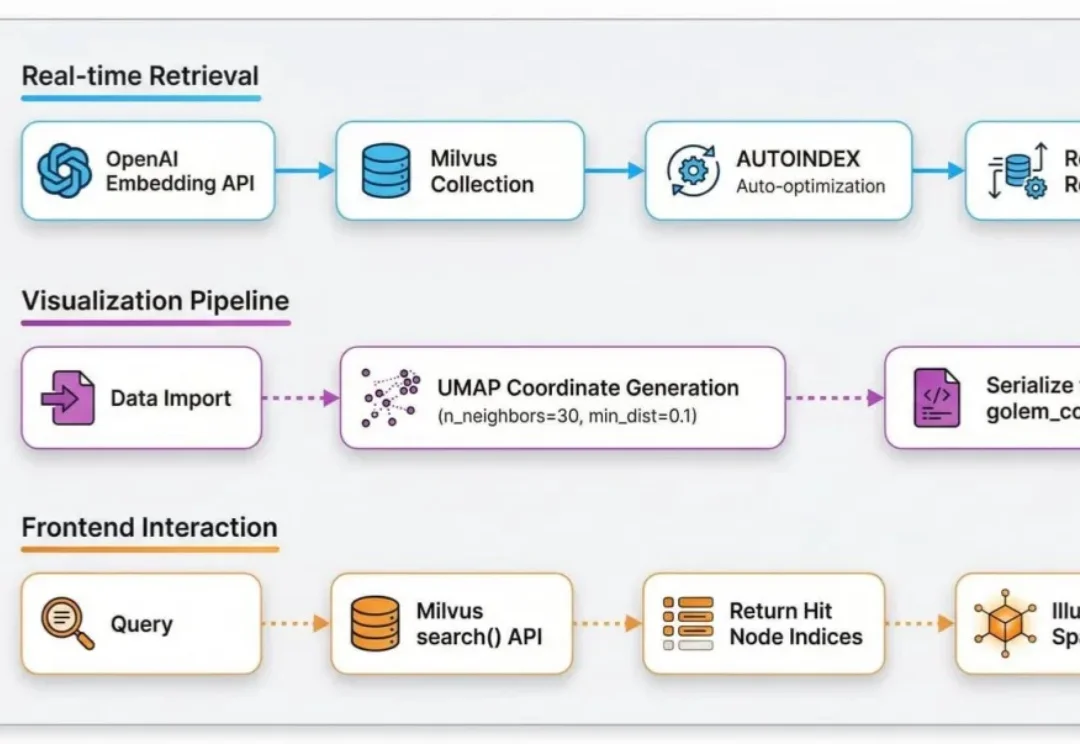
最近,在GitHub上发现一个宝藏项目Project_Golem 。
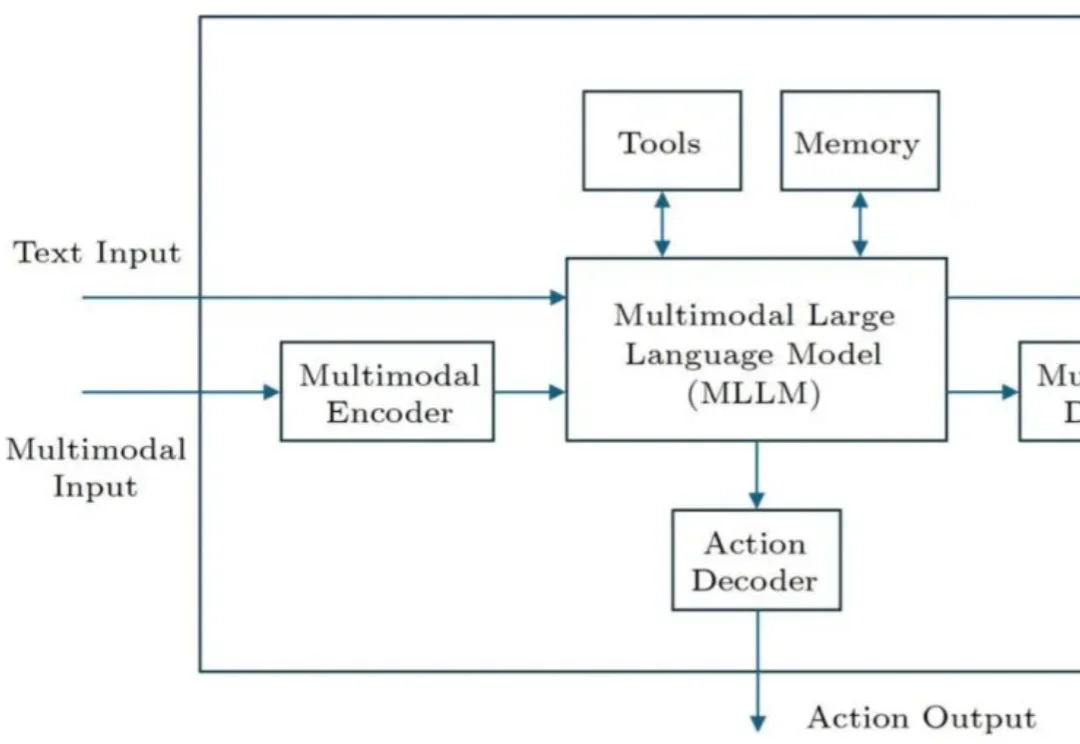
AI 智能体是人工智能领域的重要研究方向之一。近期,字节跳动的李航博士在我国计算机科学领域顶级期刊 Journal of Computer Science and Technology(JCST)上发表了一篇题为《General Framework of AI Agents》的观点论文(将收录于 JCST 创刊 40 周年专辑),提出了一个涵盖软件智能体和硬件智能体的通用框架。
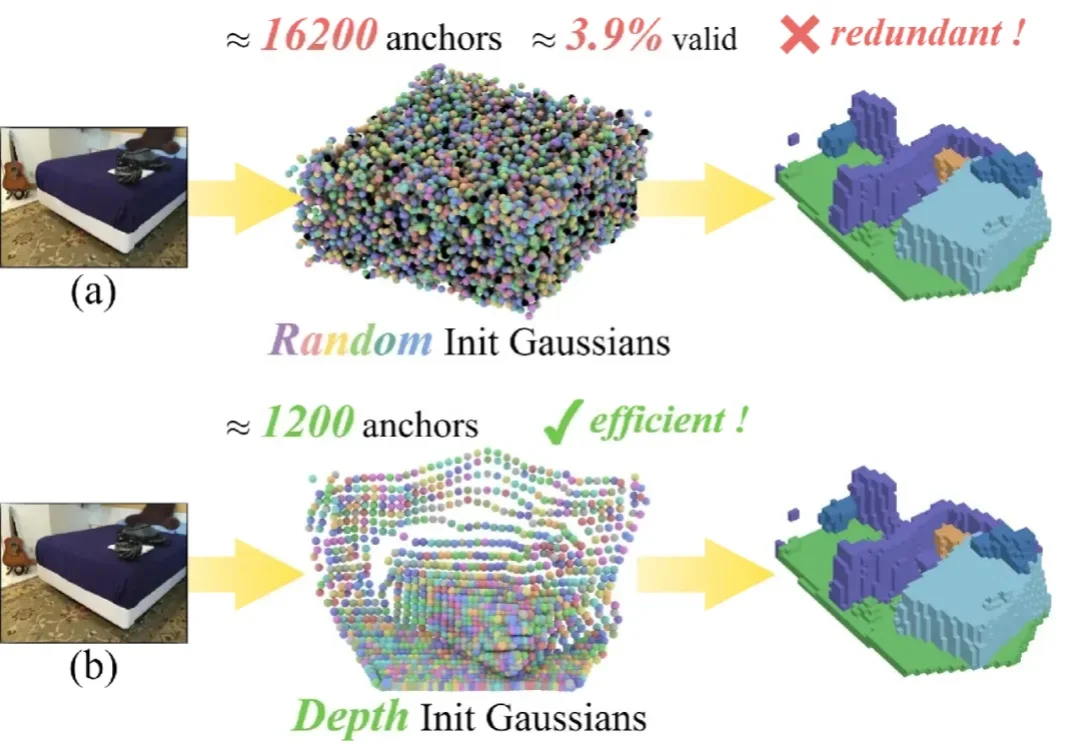
单目 3D 语义场景补全 (Semantic Scene Completion, SSC) 是具身智能与自动驾驶领域的一项核心技术,其目标是仅通过单幅图像预测出场景的密集几何结构与语义标签。