
轨迹跟踪误差直降50%,清华汪玉团队强化学习策略秘籍搞定无人机
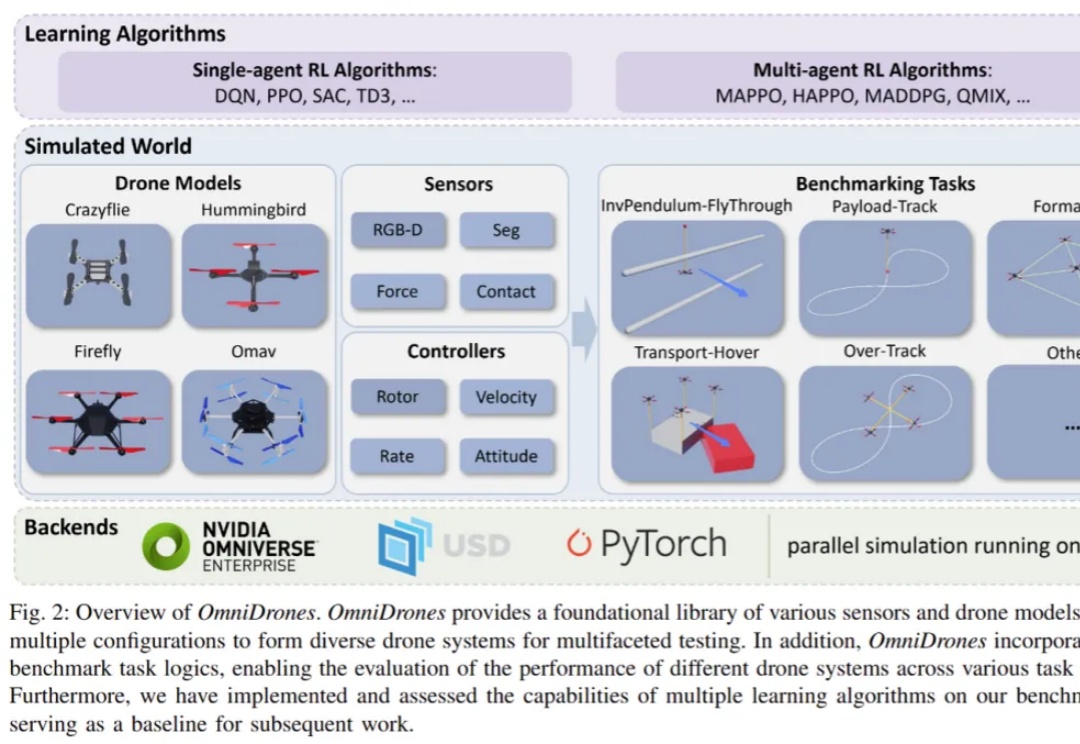
轨迹跟踪误差直降50%,清华汪玉团队强化学习策略秘籍搞定无人机控制无人机执行敏捷、高机动性的行为是一项颇具挑战的任务。传统的控制方法,比如 PID 控制器和模型预测控制(MPC),在灵活性和效果上往往有所局限。而近年来,强化学习(RL)在机器人控制领域展现出了巨大的潜力。通过直接将观测映射为动作,强化学习能够减少对系统动力学模型的依赖。
来自主题: AI技术研报
5113 点击 2024-12-28 11:35
控制无人机执行敏捷、高机动性的行为是一项颇具挑战的任务。传统的控制方法,比如 PID 控制器和模型预测控制(MPC),在灵活性和效果上往往有所局限。而近年来,强化学习(RL)在机器人控制领域展现出了巨大的潜力。通过直接将观测映射为动作,强化学习能够减少对系统动力学模型的依赖。
「相比于强化学习(RL),我确实更喜欢模型预测控制(MPC)。至少从 2016 年起,我就一直在强调这一点。强化学习在学习任何新任务时都需要进行极其大量的尝试。相比之下,模型预测控制是零样本的:如果你有一个良好的世界模型和一个良好的任务目标,模型预测控制就可以在不需要任何特定任务学习的情况下解决新任务。这就是规划的魔力。这并不意味着强化学习是无用的,但它的使用应该是最后的手段。」