CVPR 2026最热方向,被一家杭州团队率先跑进了端侧!
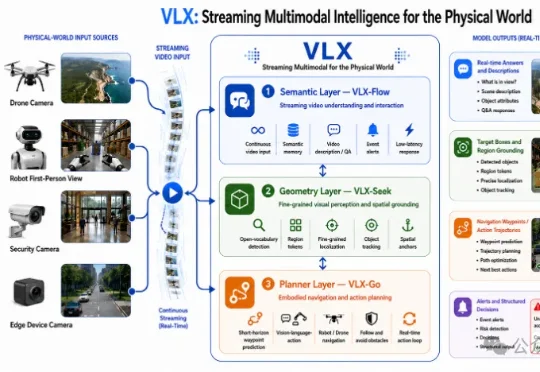
CVPR 2026最热方向,被一家杭州团队率先跑进了端侧!刚刚,Om AI发布全球首个面向物理世界的端侧流式多模态模型系列——VLX。VLX主打真实世界的端侧与具身场景,总共三款模型,三天连发:这三款模型连起来,不仅构成了多模态模型持续感知、精准定位、行动决策的能力闭环。
来自主题: AI技术研报
9521 点击 2026-06-28 11:14
 搜索
搜索
刚刚,Om AI发布全球首个面向物理世界的端侧流式多模态模型系列——VLX。VLX主打真实世界的端侧与具身场景,总共三款模型,三天连发:这三款模型连起来,不仅构成了多模态模型持续感知、精准定位、行动决策的能力闭环。
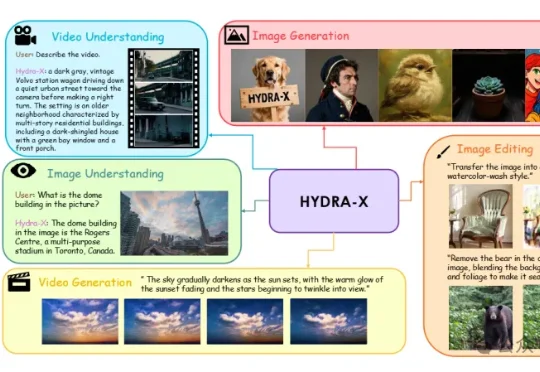
南大王利民团队&腾讯混元的HYDRA系列(HYDRA,HYDRA-X)工作挑战了这个惯例,用一个基于ViT的统一视觉Tokenizer,帮助原生多模态模型更好地“看懂”和“创作”。训练一个基于ViT的Unified Tokenizer,使其同时具有理解和生成的能力,进而同时作为理解和生成的Autoencoder,来支持原生多模态模型(Unified Multimodal Models)的训练。
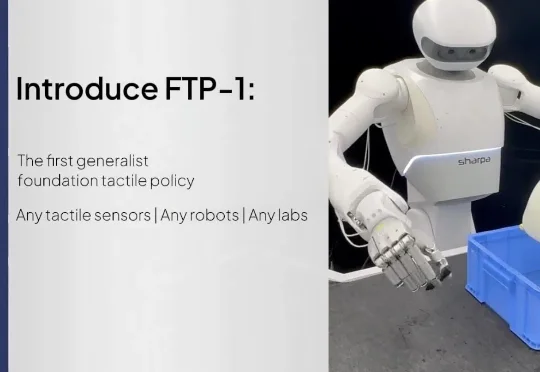
来自 Sharpa、清华大学、UC Berkeley、上海交通大学、ETH Zurich 等机构的研究者提出了首个通用触觉基础策略 FTP-1。它基于约 3,000 小时、来自 26 个数据来源和 21 种触觉传感器的数据进行预训练
看《堡垒之夜》的游戏录像,也能训练AI?没错,一家靠着海量游戏录像训练AI的公司General Intuition,刚刚完成3.2亿美元(约合人民币21.77亿元)融资。General Intuition公开披露的融资总额已达4.54亿美元,估值23亿美元。
来自至知创新研究院(IQuest Research)、中国人民大学高瓴人工智能学院、KAUST等机构的研究团队提出了FORT,一个面向Deep Search Agent的shortcut-resistant training-data synthesis framework。

图灵奖得主杨立昆提出的JEPA世界模型理论,终于在敏捷无人机机载高频控制场景完成工程落地了。

过去十年,推荐系统最核心的动作可以概括成一个字:找。
过去一年,Mobile/Phone-use Agent在各类评测榜单上进展很快。
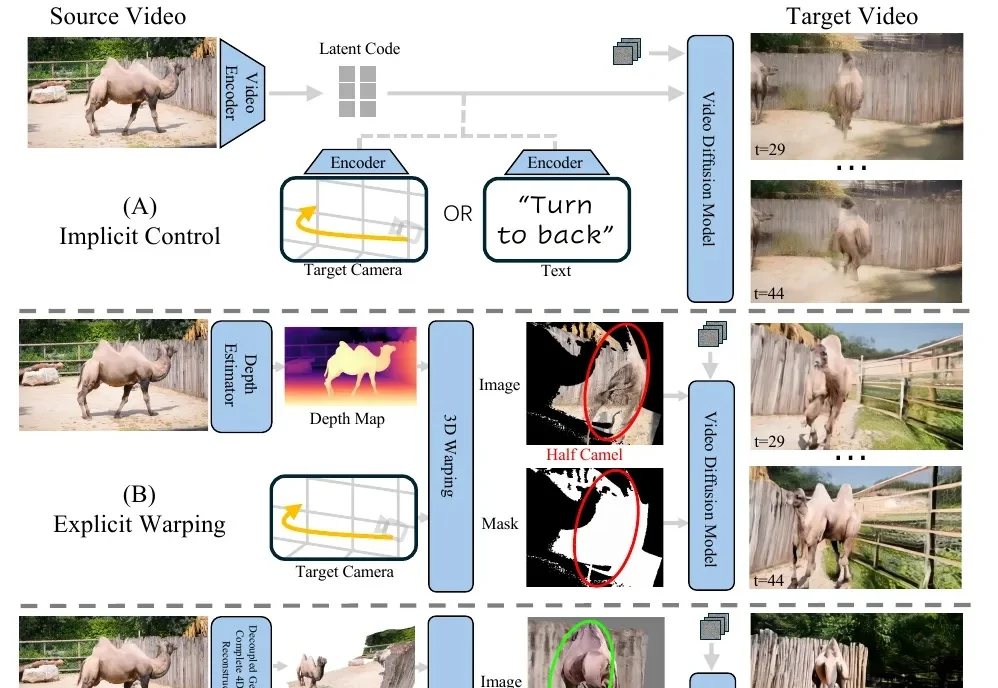
给定一段普通单目视频,FreeOrbit4D 可沿任意指定相机轨迹「重拍」整个动态场景,包括影视级的「子弹时间」环绕镜头。

UBC 和 Weathon Software 的研究提出,图像的美学对齐正在削弱艺术表达。