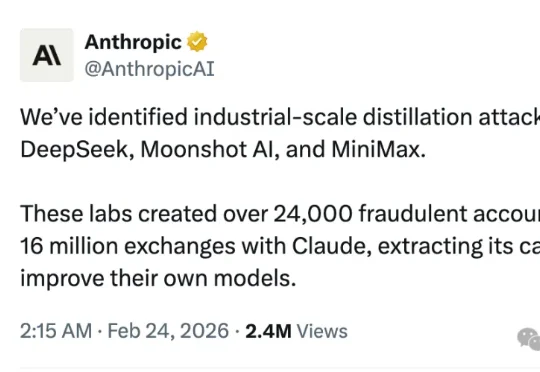
刚刚,Anthropic深夜大点名,这三家中国公司进行蒸馏攻击?!
刚刚,Anthropic深夜大点名,这三家中国公司进行蒸馏攻击?!刚刚, Anthropic 发推称,DeepSeek、Moonshot AI和MiniMax三家国内的 AI 公司对Claude进行大规模的蒸馏攻击。OK, A 社你真的很讨厌中国公司了。简单说就是:这三家公司用大量假账号,疯狂地向 Claude 提问,然后拿 Claude 的回答去训练自己的模型。
来自主题: AI资讯
9910 点击 2026-02-24 09:17