
世界模型再迎新突破,兔展智能UniWorld-View登顶WorldScore榜单
世界模型再迎新突破,兔展智能UniWorld-View登顶WorldScore榜单最近,兔展智能联合北京大学、鹏城实验室研发的 UniWorld-View 登顶李飞飞团队 WorldScore 世界模型榜单(训练数据来自北大系初创企业元空智能),并完成国产昇腾算力适配与代码、权重开源。
来自主题: AI资讯
8705 点击 2026-07-28 00:07
 搜索
搜索
最近,兔展智能联合北京大学、鹏城实验室研发的 UniWorld-View 登顶李飞飞团队 WorldScore 世界模型榜单(训练数据来自北大系初创企业元空智能),并完成国产昇腾算力适配与代码、权重开源。
数据市场的故事,正在进入新一轮周期。来自企业真实工作流的 Real-world Data,成为越来越多 AI Labs 争夺的新资源。比如 GitHub 就是典型的 Real-world Data,它几乎完整保留了一个问题从出现到解决的全过程。相比之下,今天绝大多数 Human Data 公司提供的,仍是人为构造的数据。

今天分享一家很新的公司,Mecka AI,Mecka AI 是一家给机器人公司提供训练数据的公司。更具体一点,Mecka AI 做的是“人类动作数据”。也就是说,Mecka 做的事情很像“机器人时代的 Scale AI”。

据外媒 The Information 报道:Meta 正在限制员工在 AI 模型构建中使用 Claude Code 和 Codex,原因是担心涉及模型蒸馏。 Meta 担心这些外部模型生成的内容,可能进入自家的训练数据或评测体系,从而引发所谓的模型蒸馏争议。
近年来,大语言模型展现出了越来越强的能力,从上下文学习(In-Context Learning, ICL)到复杂推理、代码生成,这些能力不断刷新人们对模型能力边界的认知。
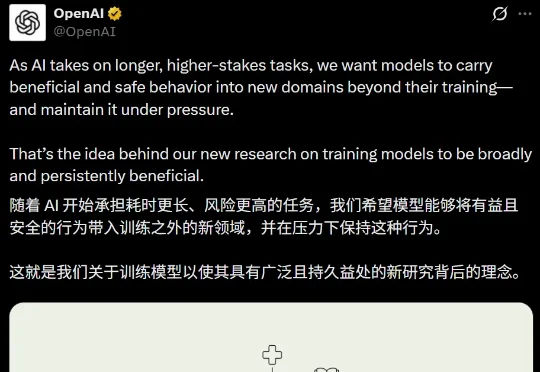
就在最近,OpenAI扔出一篇重磅论文。他们发现,只教AI好好看病,它写代码居然也不作弊了。方法简单到离谱:拿5%的训练数据,教模型在回答健康问题时诚实、谨慎、知错能改。
偷师、借道、换血、误删……折腾到最后,xAI成了给对手供电的人。
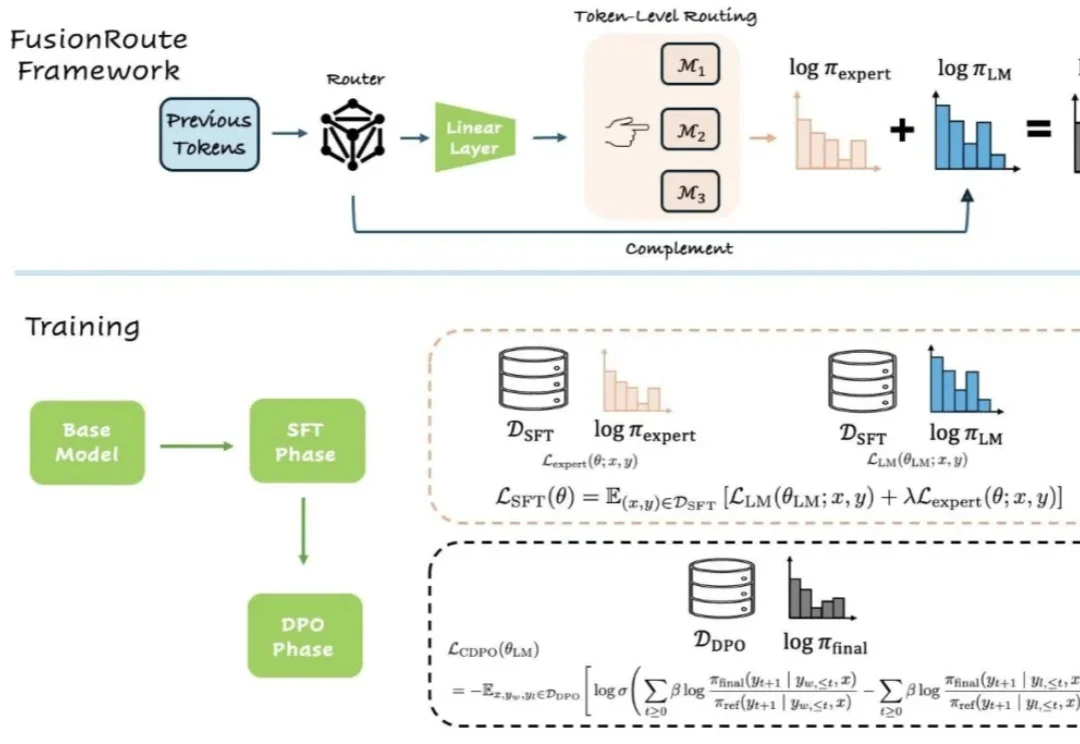
近年来,大语言模型能力的提升,已不再仅仅依赖于更大的模型规模或更多的训练数据。越来越多的研究开始探索另一条路径:通过多个专家模型的协作来完成生成任务。
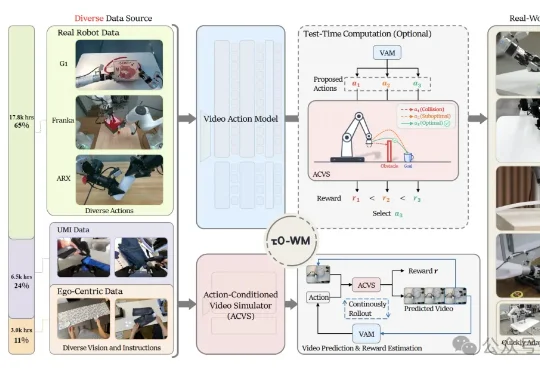
刚刚,上海创智学院副教授、智元机器人首席科学家罗剑岚带队,发布全球最大规模的开源预训练具身世界模型——τ0-World Model(τ0-WM)。整个τ0-WM参数量达到5B,预训练数据规模高达约3万小时。其中,真机遥操作数据第一次成了绝对主力,占到了1.78万小时。
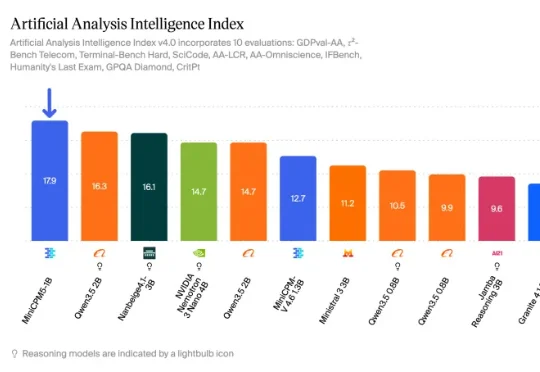
我去搜了下 MiniCPM5-1B 的数据,发现面壁智能刚刚把背后的核心数据集给开源了。一共是两份 L3 级数据集:Ultra-FineWeb-L3 :600B tokens,中英文都有,是目前最大的中文开源合成预训练数据集。