零样本 Sim-to-Real !实现五指灵巧手力控抓取与手内操作
零样本 Sim-to-Real !实现五指灵巧手力控抓取与手内操作实现具备人类水平的灵巧操作能力,是机器人学领域长期以来的核心挑战之一。尽管多指灵巧手在硬件上具备了类似人类的潜力,但由于接触丰富的物理特性和非理想的驱动机制,训练能够直接部署在真实硬件上的控制策略仍然非常困难。
来自主题: AI技术研报
6552 点击 2026-03-26 10:48
 搜索
搜索
实现具备人类水平的灵巧操作能力,是机器人学领域长期以来的核心挑战之一。尽管多指灵巧手在硬件上具备了类似人类的潜力,但由于接触丰富的物理特性和非理想的驱动机制,训练能够直接部署在真实硬件上的控制策略仍然非常困难。
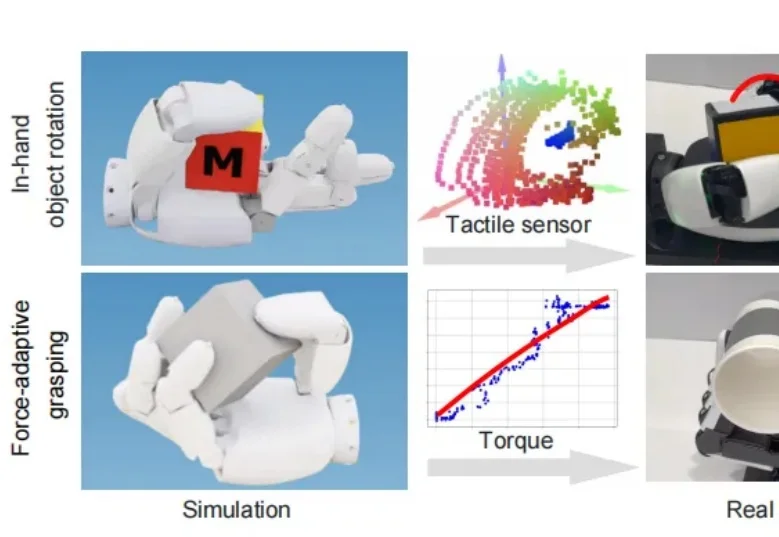
机器人使用灵巧手帮人类在工厂里拧螺丝,在家里切菜做饭的一天何时可以到来?为了实现这一愿景,旨在解决灵巧操作技能 sim-to-real 难题的 DexNDM 应运而生。
人形机器人的运动控制,正成为强化学习(RL)算法应用的下一个热点研究领域。当前,主流方案大多遵循 “仿真到现实”(Sim-to-Real)的范式。研究者们通过域随机化(Domain Randomization)技术,在成千上万个具有不同物理参数的仿真环境中训练通用控制模型,期望它能凭借强大的泛化能力,直接适应动力学特性未知的真实世界。