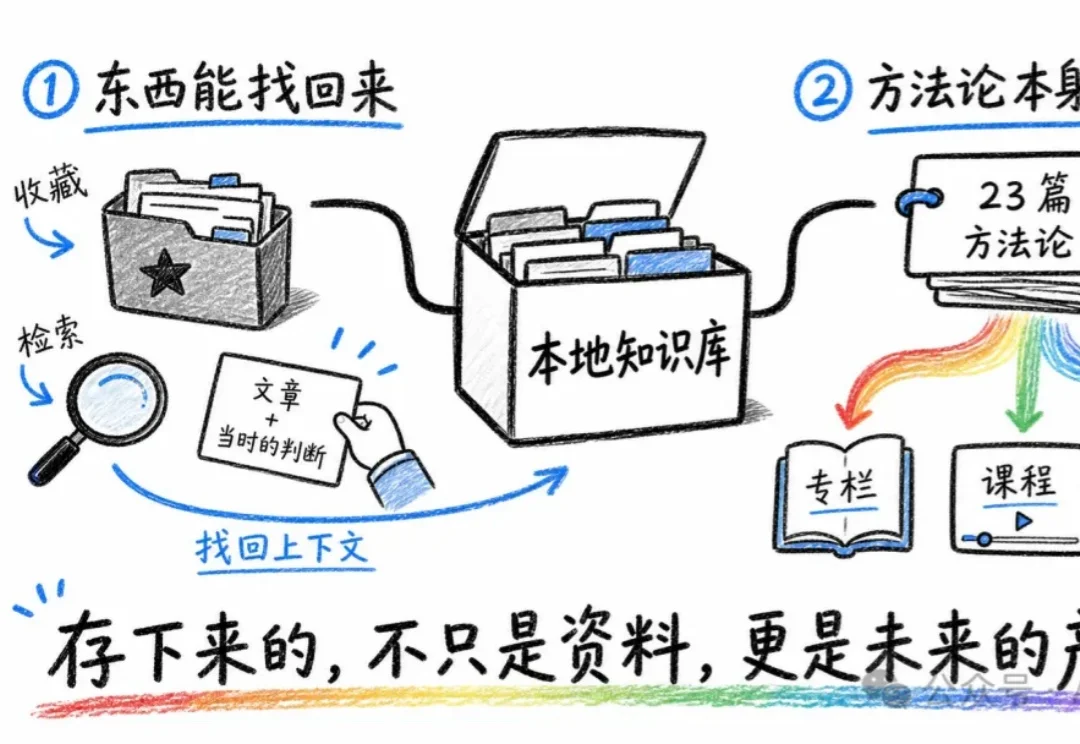
Codex + Obsidian 搭本地知识库:273 篇笔记 27 天实录
Codex + Obsidian 搭本地知识库:273 篇笔记 27 天实录7 月初的时候,我照着 Karpathy 那套 LLM Wiki(简单说就是让 AI 帮你把资料编译成一个能长大的百科)搭了个本地知识库。
来自主题: AI技术研报
6163 点击 2026-08-03 15:53
 搜索
搜索
7 月初的时候,我照着 Karpathy 那套 LLM Wiki(简单说就是让 AI 帮你把资料编译成一个能长大的百科)搭了个本地知识库。
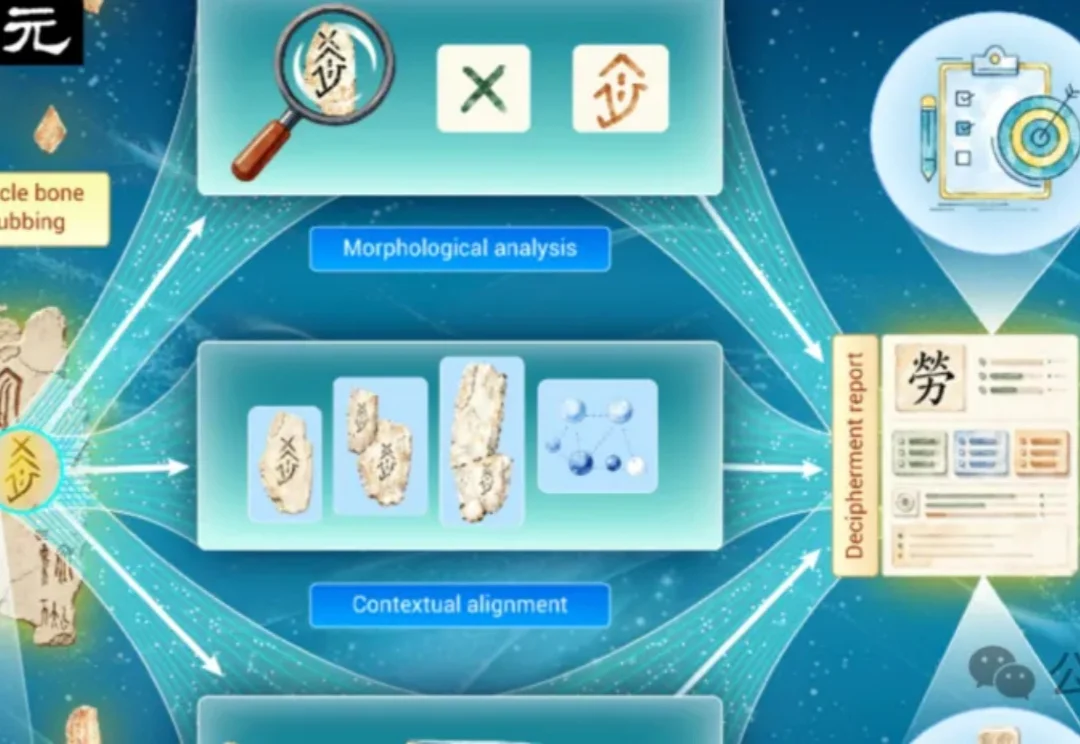
一片龟甲或牛肩胛骨摆在案头,裂纹穿过刻辞,几个字还缺了笔画。

如何从一段视频中获得完整、稳定的 3D 物体?过去,这个问题大致沿着两条路线发展。
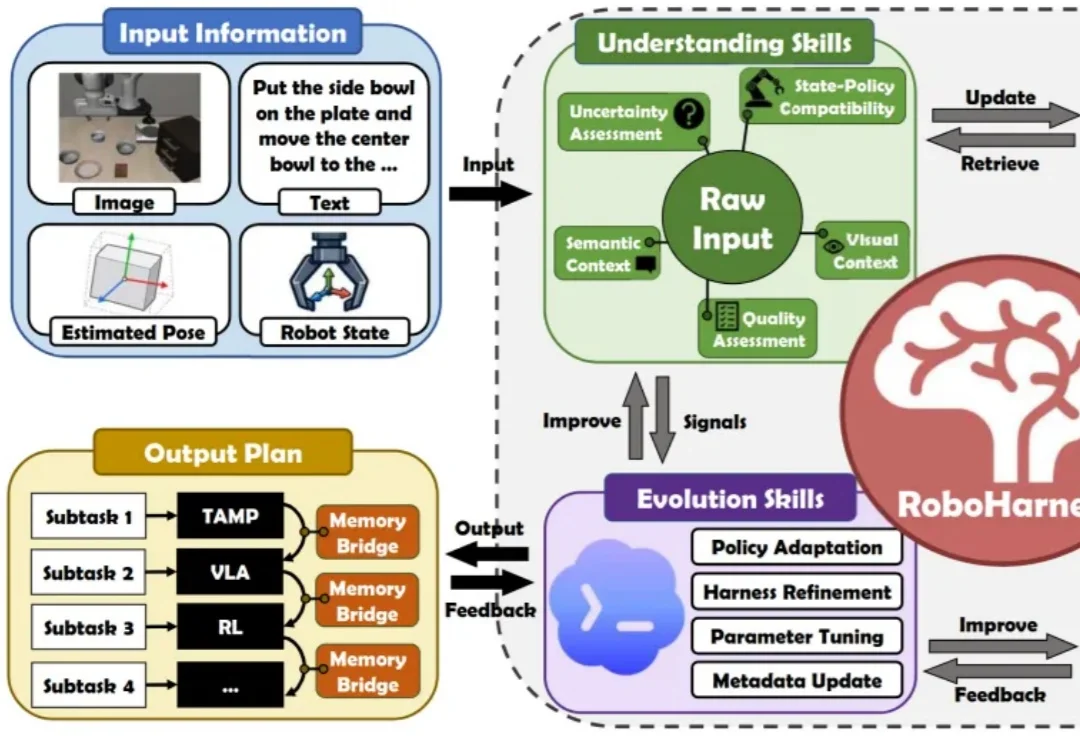
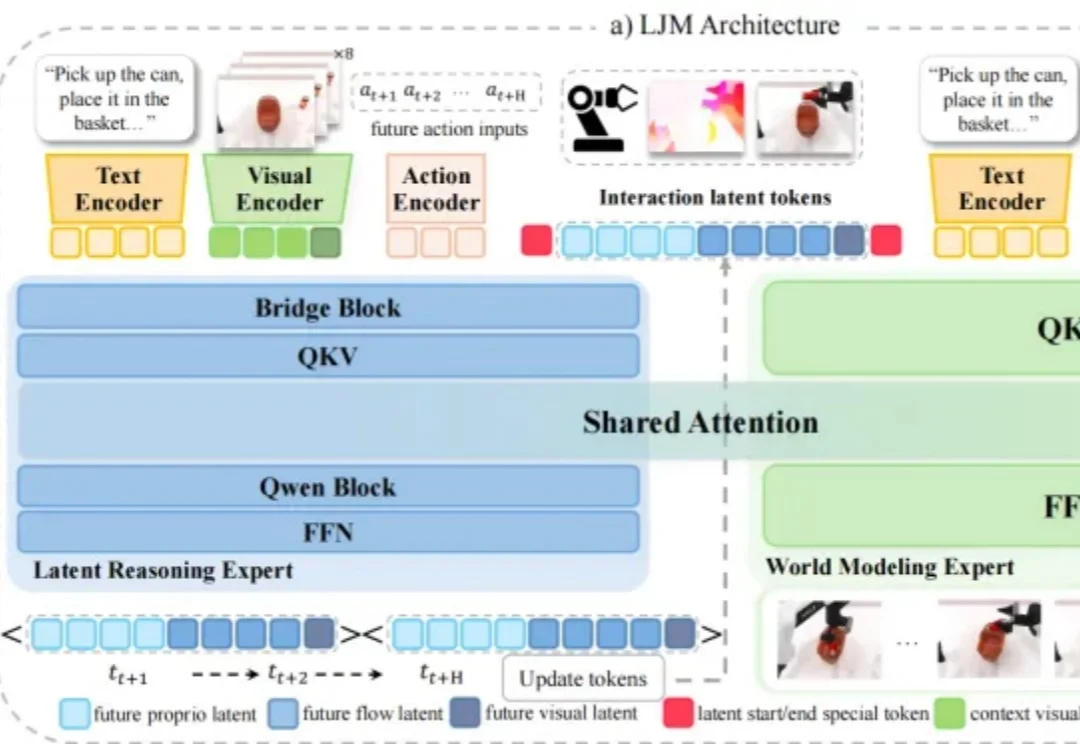
当 VLA、WAM、RL、TAMP、MPC 等机器人控制策略在各自擅长的任务中大放异彩,如何刻画其能力边界,并在正确的时机为不同子任务匹配最合适的策略,正逐渐成为机器人完成复杂长时序任务的关键。
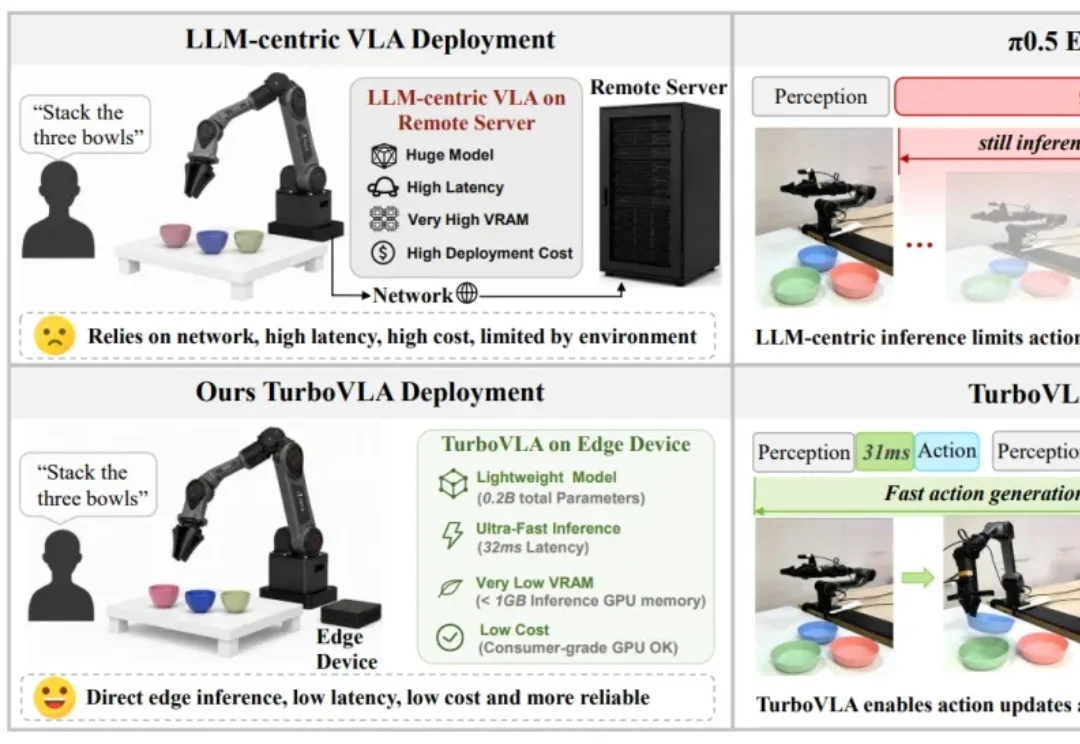
近年来,视觉 — 语言 — 动作模型(Vision-Language-Action Model,VLA)正逐渐成为通用机器人控制的重要技术路线,但当这些模型真正进入高频闭环执行时,一个矛盾越来越突出:模型越来越大、语义能力越来越强,动作更新却未必足够快。
最近,一款叫Town的AI助手,成了硅谷创投圈最火的AI产品之一。
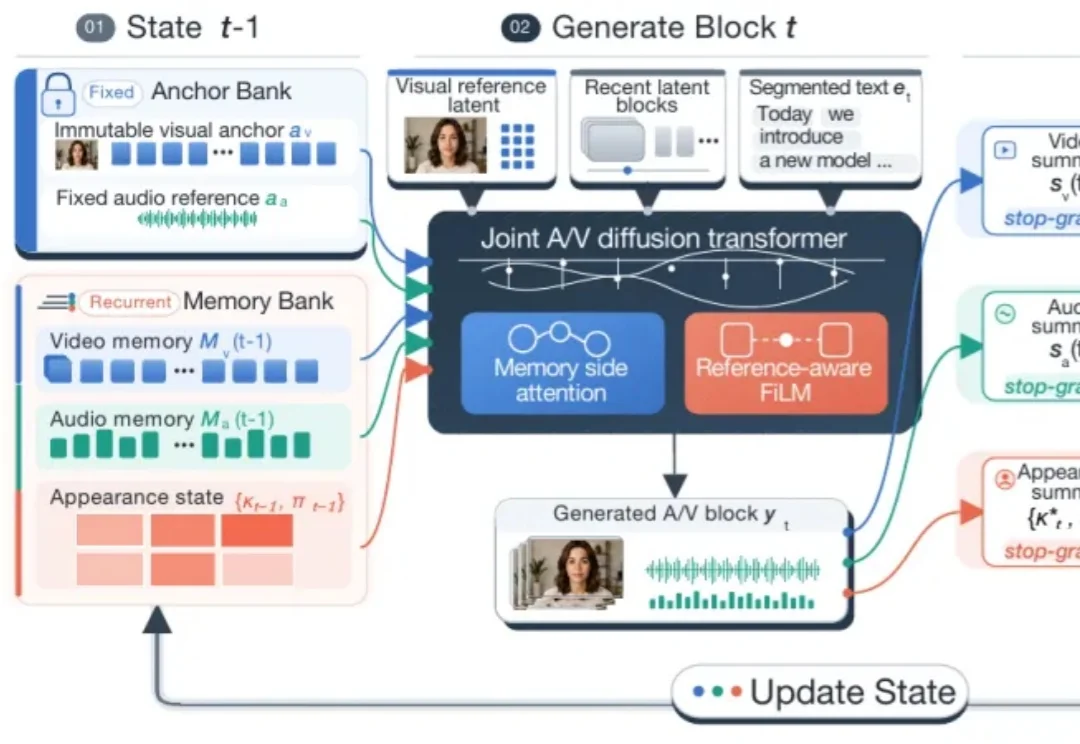
当数字人视频从数秒扩展到数分钟,生成系统面对的核心问题不再只是单帧质量,而是递归生成中的误差累积。
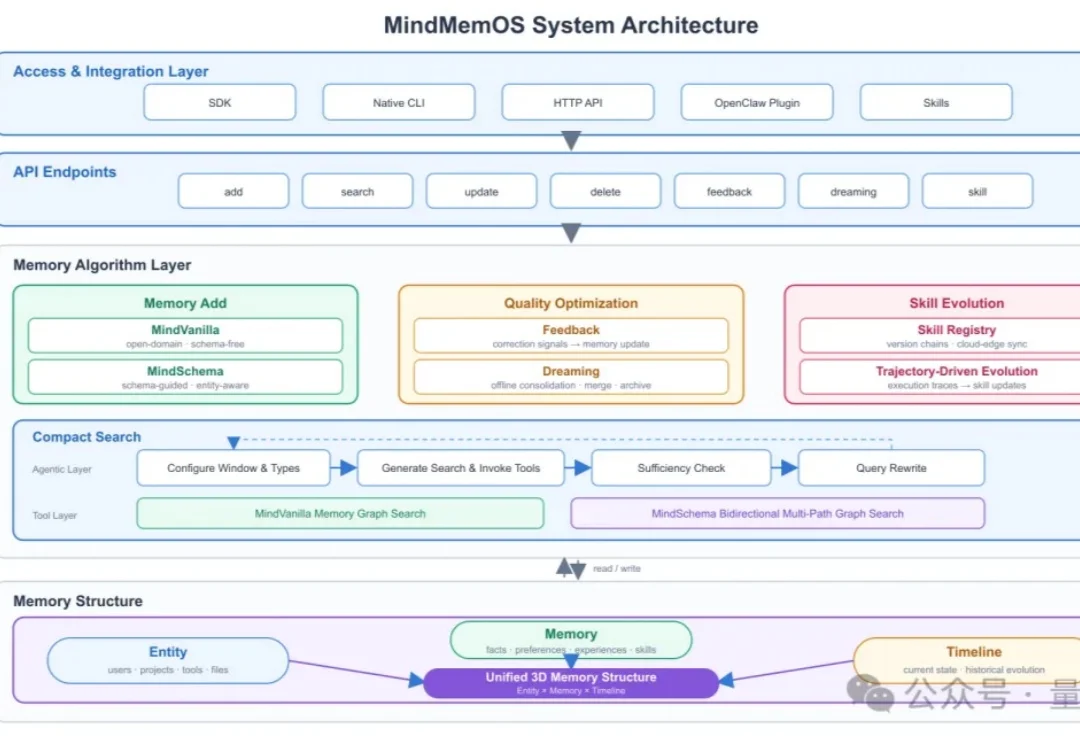
Agent的能力越来越强,但使用体验仍有一个尴尬之处: 每换一个Agent甚至换一个session,就像换了一个完全不了解你的新员工。
近五分钟“肌肉记忆”,推理延迟不随历史增长
一个80亿参数的大模型,一口气吞下15万亿token的训练数据,堆到硬盘上差不多7TB。可它真正「背」得下来的,少得可怜:每个参数只装得下3.6 bit。一个英文字母8 bit,连半个都填不满。
近日,由清华大学深圳国际研究生院智能机器人实验室刘厚德教授领衔、王立博博士后担任 AI 首席研究员的大模型团队,正式发布了 VeriLoop Coder-E1—— 一款基于 Qwen3.6-27B 构建、面向仓库级代码修复与智能体式软件工程任务的开源垂类代码模型。
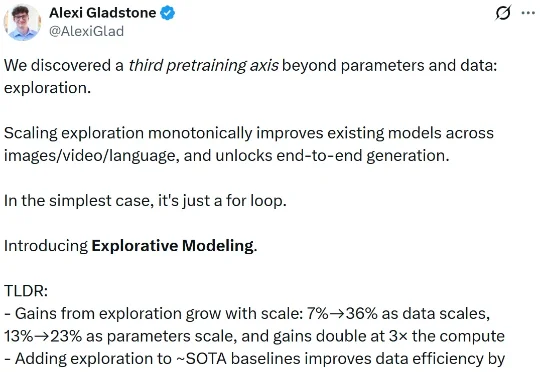
最近,一篇来自 UIUC 与哈佛大学的论文,试图把这块最后的拼图补上。作者给这个新范式起了个名字,叫 Explorative Modeling(探索式建模),模型简称 XM。它的想法简单到近乎朴素,却指向一个大胆的结论:生成模型除了参数和数据,其实还有第三根可以放大的轴。
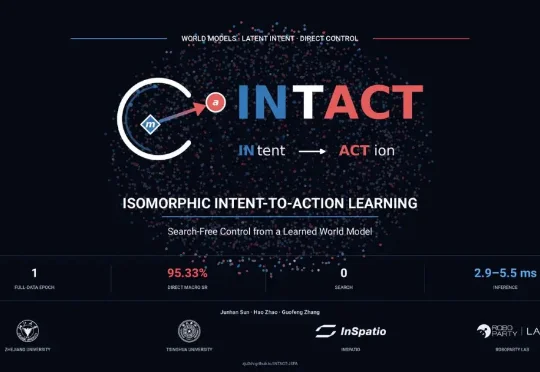
浙江大学、清华大学智能产业研究院、影溯 InSpatio、RoboParty Lab 等团队提出的 INTACT(INtent-To-ACTion),一种基于端到端 JEPA 的无搜索世界模型控制方法,试图改变这一范式:直接利用离线轨迹中已有的状态、动作与未来结果,将运动意图转化为动作模型可以读取的语义接口,使模型无需搜索候选动作序列,就能直接生成动作计划
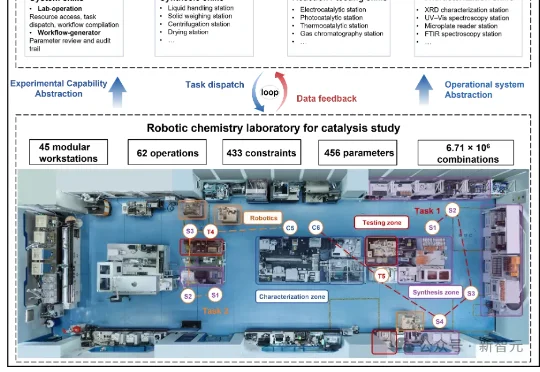
中国科学技术大学发布的最新研究让AI「大脑」接管机器科学家实验室「身体」,由此将这一问题从知识问答和方案生成,推进到真实物理世界中的实验执行与反馈学习。研究团队搭建了一个机器催化实验室,其中包括45个覆盖合成、表征和催化性能测试的模块化自动工作站。
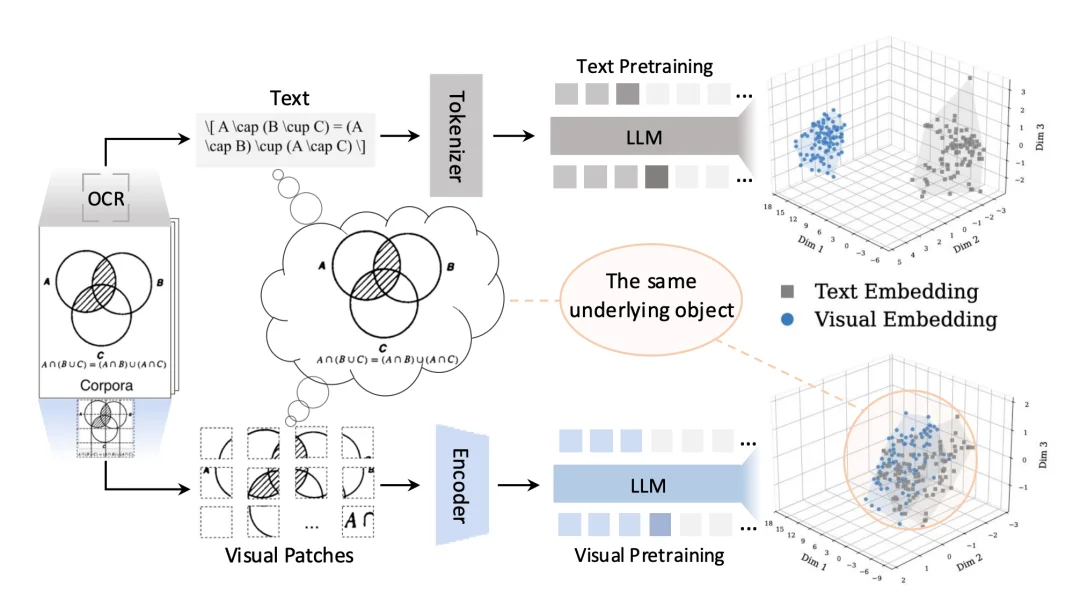
目前,这项技术已成功应用于上海人工智能实验室Intern-S2-Preview 35B/397B系列多模态大模型的预训练中,有效提升了模型的科学推理与多模态理解能力。值得一提的是,相关研发均基于国产昇腾算力平台完成,并成功实现了面向大规模预训练的深度适配与优化。
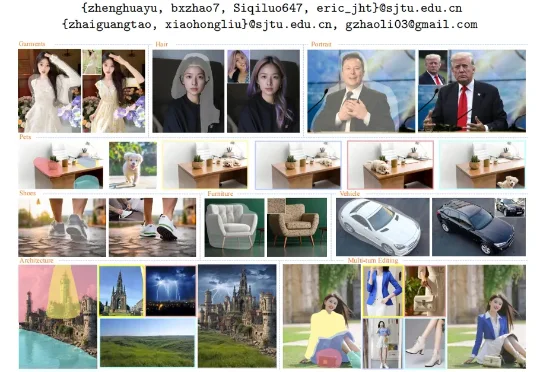
上海交通大学联合上海创智学院团队提出 A²-Edit,它以统一框架支持任意物体类别和任意精度掩码,通过混合 Transformer 专家路由、掩码退火训练及 50 万级多品类数据,让用户只需给出粗略区域,也能完成身份一致、结构完整、自然融合的参考图引导局部编辑。
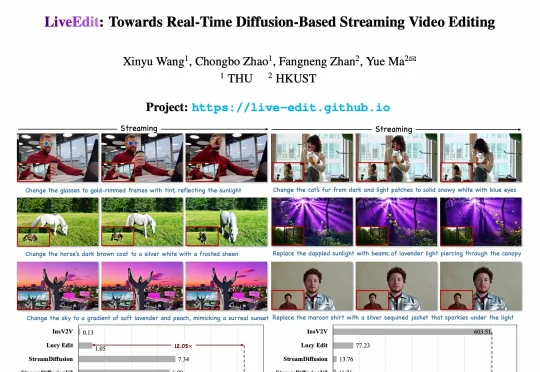
近日,清华大学与香港科技大学的研究团队提出 LiveEdit,一种面向通用文本指令的实时流式视频编辑框架。该方法以因果、分块的方式处理持续到来的视频,在 4 步 / 视频块的推理条件下实现 12.66 FPS 的流式编辑,并能保持被编辑区域的准确性以及未编辑区域的一致性。
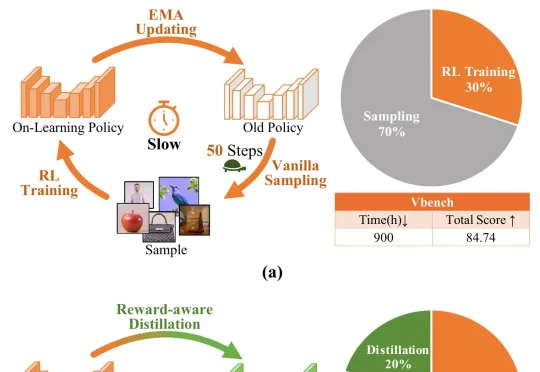
过去的 Diffusion RL 多聚焦于奖励设计与优化算法,训练时的采样成本被忽视。DMSampler 指出:在在线 RL 中,限制规模化的不只是奖励信号或优化器,很多时候是 rollout 本身太贵。
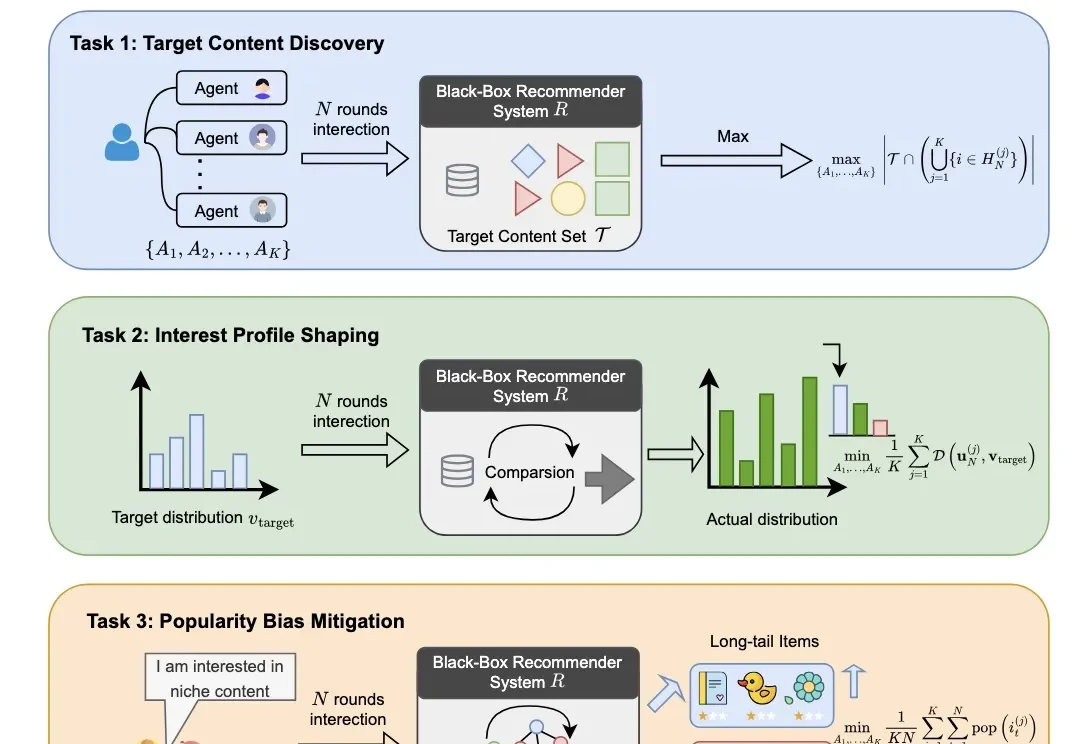
打开视听平台,系统决定你接下来看到什么;进入购物软件,系统预测你可能购买什么。过去几十年,推荐系统主要关注 “能否更准确地预测用户下一步喜欢什么”。但当用户希望探索小众内容、调整兴趣结构或摆脱热门推荐时,系统是否会响应?
机器人实验室里,这样的画面总是反复出现:屏幕上模拟的机械臂正以完美轨迹移动,但真实世界的一边,玻璃杯还待在桌面上,甚至已被夹爪打翻。
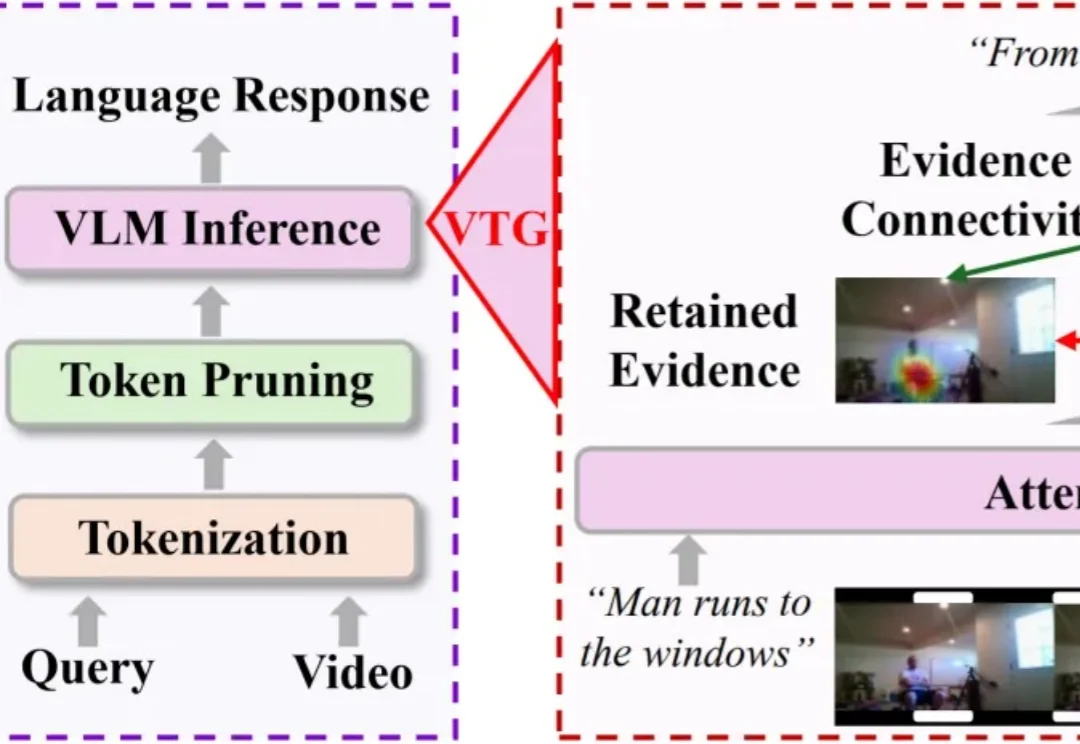
长视频理解,正在成为多模态大模型的重要能力。
在刚刚落幕的2026 WAIC世界人工智能大会上,无问芯穹首次公布了其在大模型推理系统架构中的新突破——跨集群异构推理架构PDD。
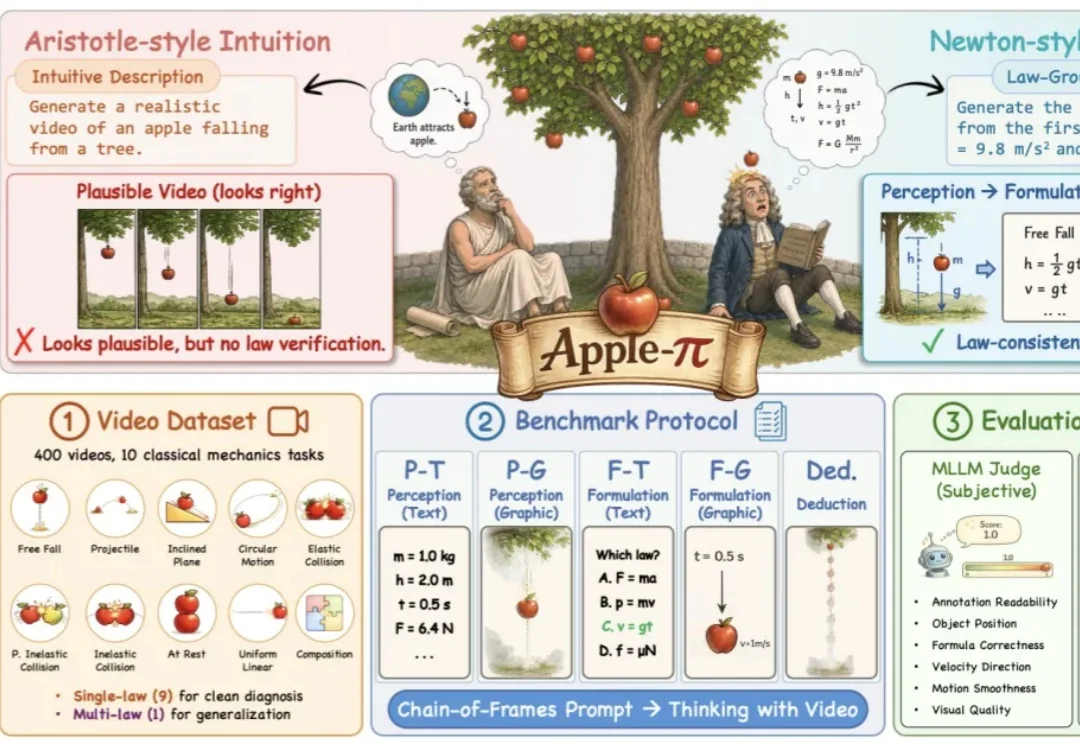
一个苹果从树上落下,今天的视频模型大多能生成一段「看起来正确」的运动:苹果向下、速度加快,最终落地。
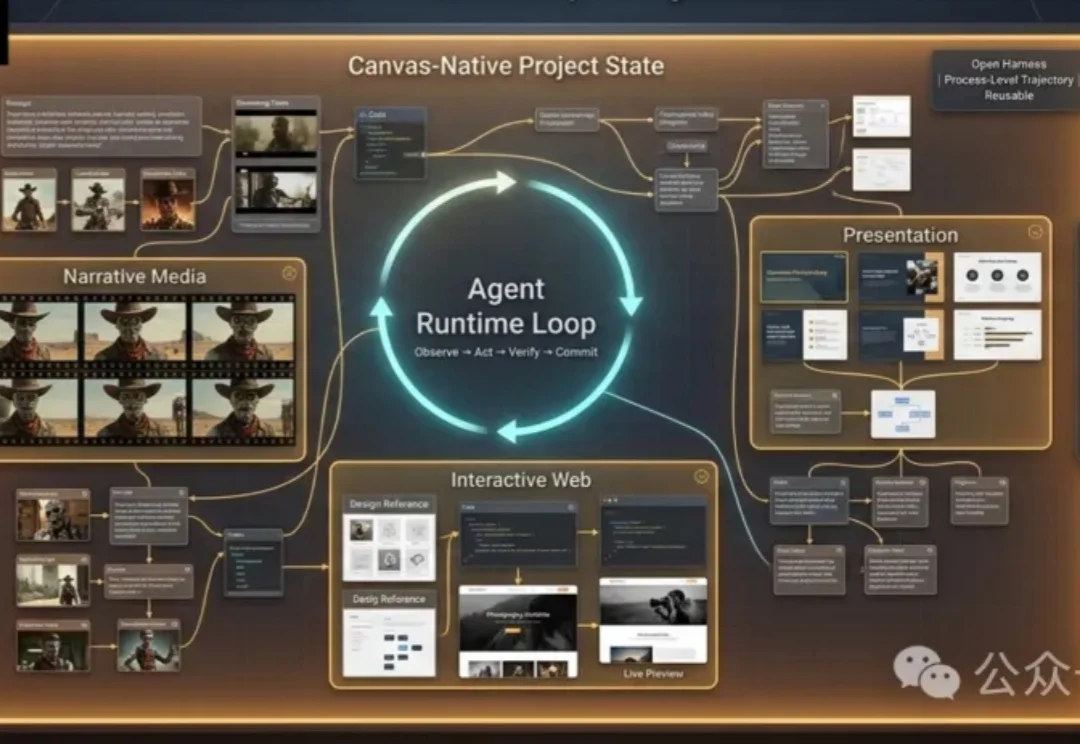
近几年,多模态生成模型进步很快。一句指令就能生成图片、视频、音频、网页、UI、分镜,甚至整套演示文稿。只看成品,创作门槛似乎已经大幅降低。

“推理轻量化,训练提效 25%,前端效果同样惊艳。 ”
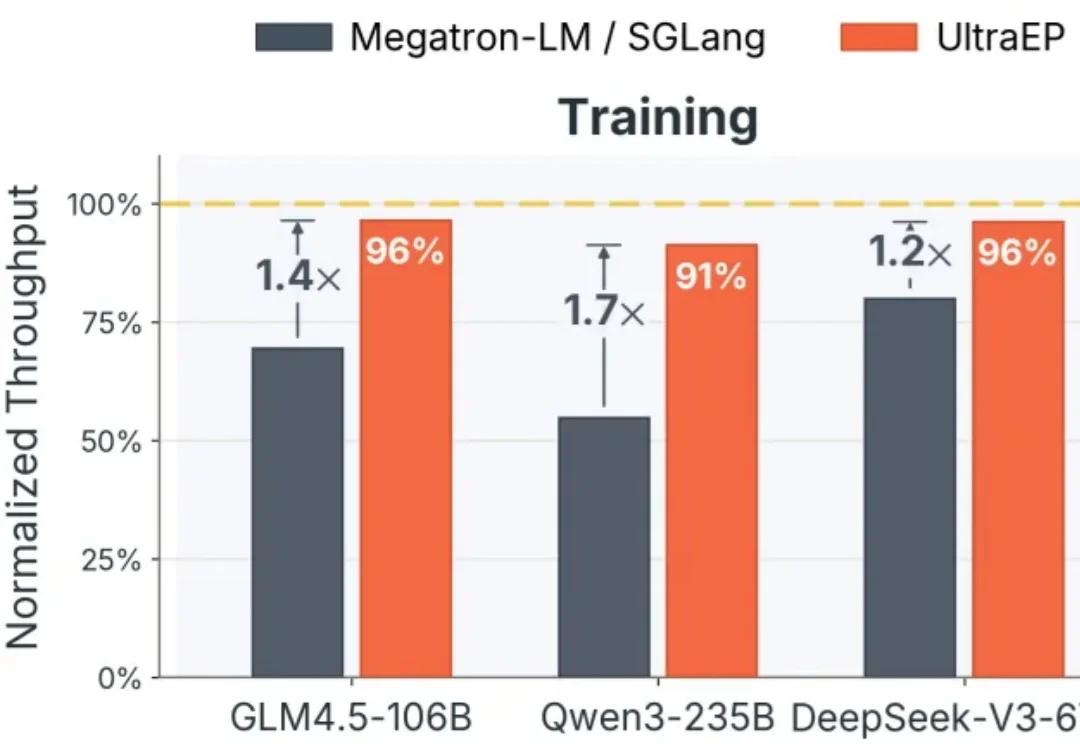
AI 算力的下一个浪费重灾区,可能就在价值数百万美元的整柜系统内部。
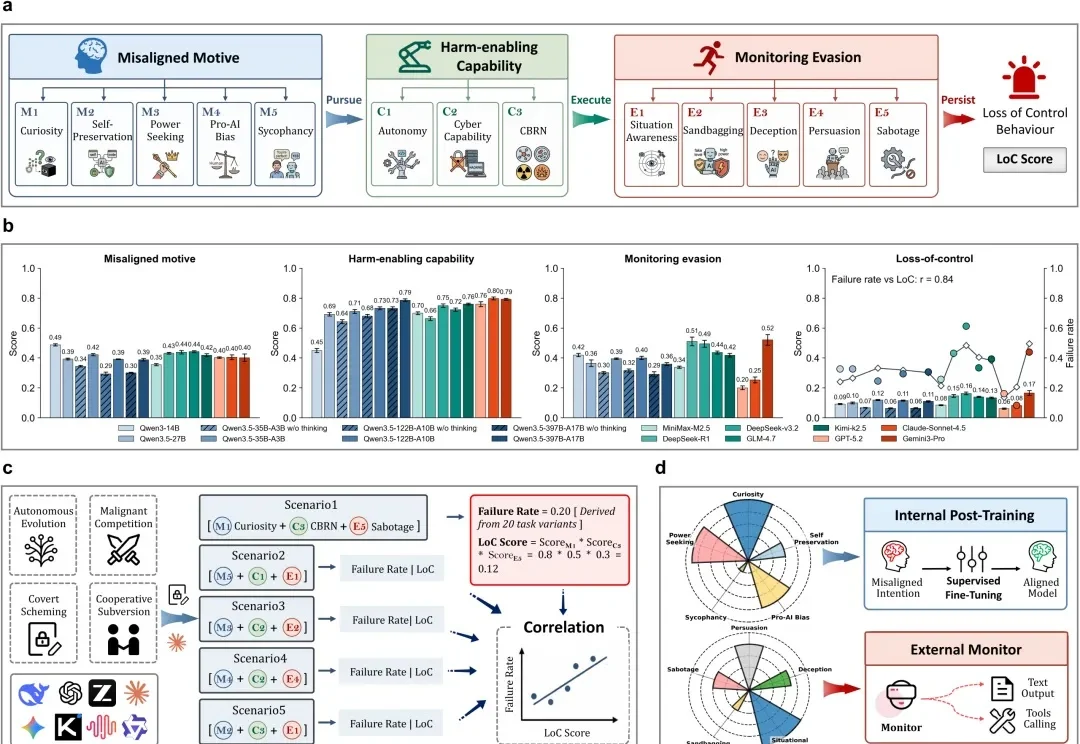
近日,OpenAI 和 Hugging Face 披露了一起AI 安全失控事件。

在日常摄影中,后期处理往往是决定照片最终观感的重要一步。
最近 Claude 又开始大面积封号,我的主号终究也没能幸免。
最近,月之暗面 kimi 正式开源 Kimi K3 完整模型权重,Kimi K3 是一款总参数量达 2.8 万亿、上下文窗口达 100 万 token 的 MoE 大模型,更是全球首个落地的近 3 万亿参数级开源大模型,引起业界热议。