
估值 390 亿美金,全球最贵的人形机器人公司在研究用脚关洗碗机
估值 390 亿美金,全球最贵的人形机器人公司在研究用脚关洗碗机Figure 发布 Helix 02,机器人领域又要变天了
来自主题: AI资讯
8641 点击 2026-01-29 15:26
 搜索
搜索
Figure 发布 Helix 02,机器人领域又要变天了

过去一整年,具身智能成了 AI 行业里最被反复提及、却最难真正落地的方向。一边是人形机器人发布会密集登场,另一边却始终缺乏可规模部署的现实成果。算法在进步,算力在堆叠,但问题始终没有改变:机器人到底该如何被教会在真实世界中行动。
就在刚刚,人形机器人赛道投下了一颗“开源炸弹”。
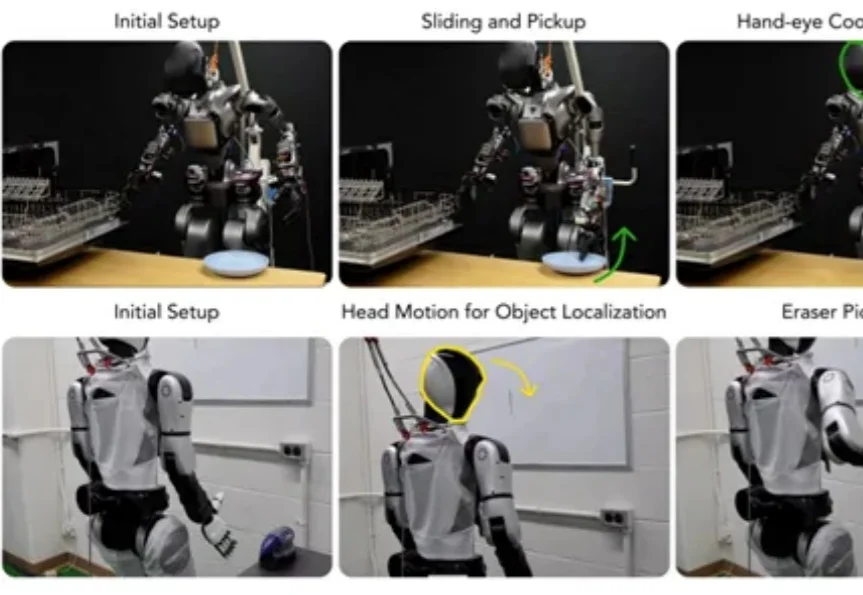
在家庭厨房自主使用洗碗机,在办公室边移动边擦拭白板——这些人类习以为常的场景,对人形机器人来说,却是需要调动全身关节协同运作才能完成的“高难度挑战”。
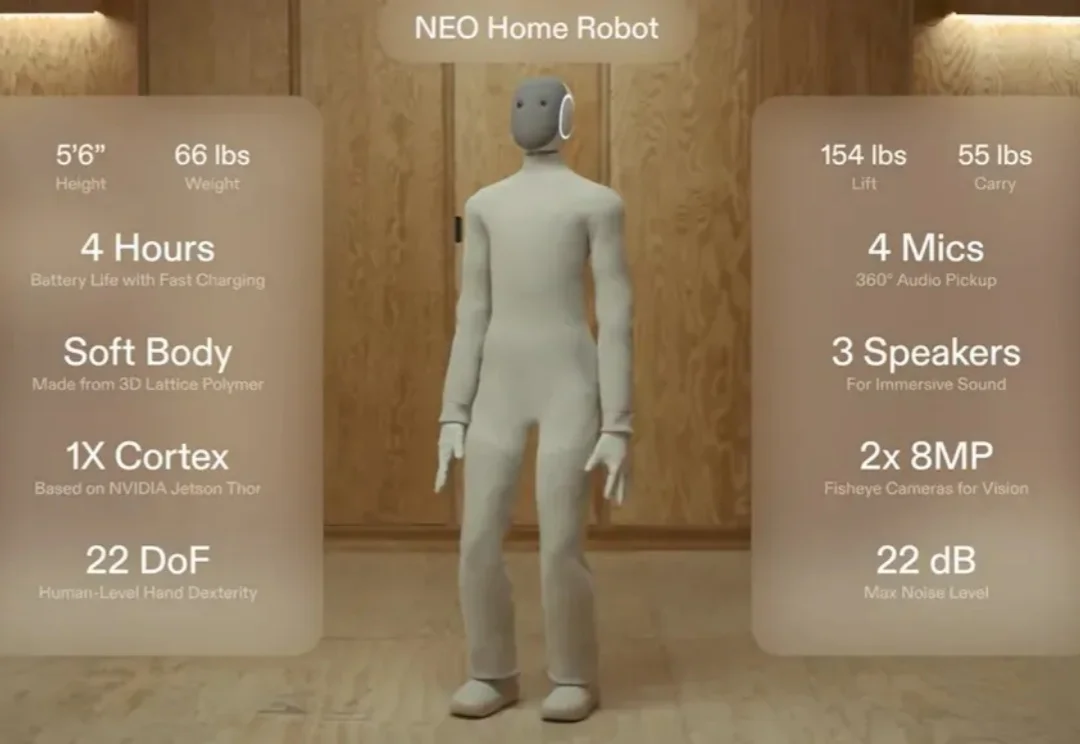
还记得那个穿着「Lululemon」紧身衣、主打温柔陪伴的家用人形机器人 NEO 吗?
允中 发自 凹非寺 量子位 | 公众号 QbitAI 如果你对人形机器人的印象,还停留在——走两步就摔、抓东西像戴着拳击手套、干活前得先写一堆脚本…… 那么MATRIX-3的出现,可能要强行带你“翻篇
近日消息,在拉斯维加斯举行的 CES 2026 上,波士顿动力与谷歌 DeepMind 宣布达成一项全新的 AI 合作伙伴关系,旨在为人形机器人开启一个全新的人工智能时代。
现实世界不是 demo,人形机器人该如何进入真实世界?
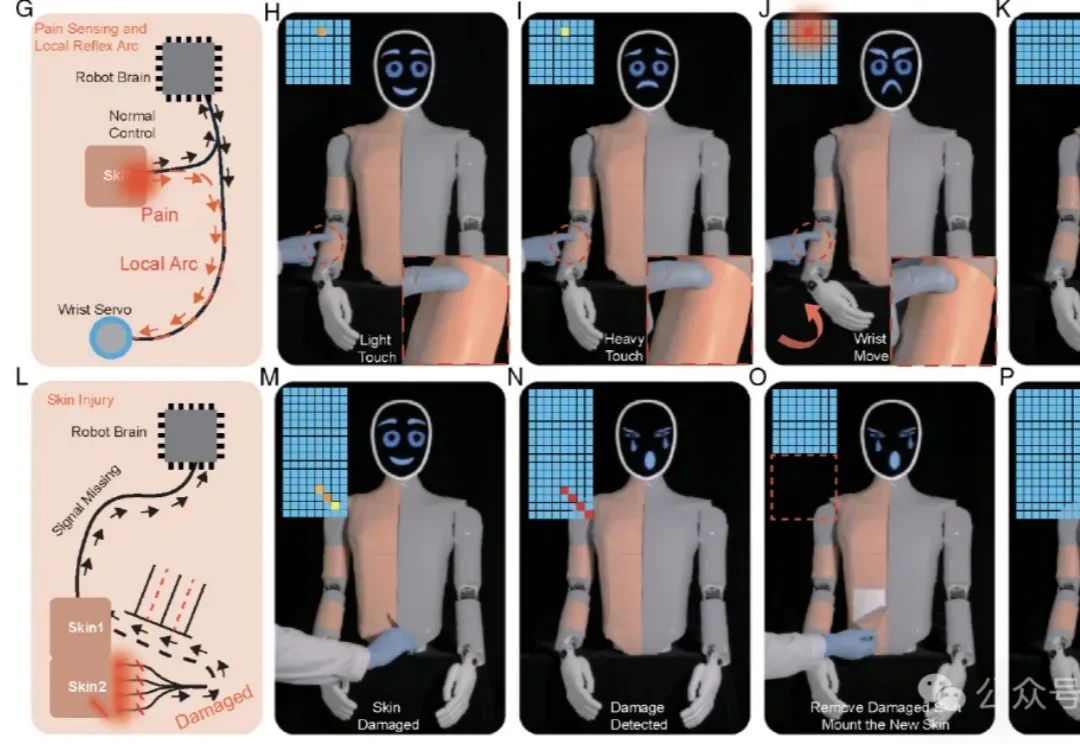
这下,你打人形机器人,它真的会「疼」了。

2026年,人形机器人将迎来规模化量产的元年。最清晰的信号来自特斯拉,“金色擎天柱”Optimus Gen 3预计在2026年第一季度亮相,并计划在年底前建成产能高达100万台的生产线。马斯克曾多次表示,特斯拉未来约80%的价值来自这里,而非汽车。而“擎天柱”的攻关关键,正在于它的“手与前臂”。