陈亦伦和李震宇创立的具身公司它石智航,不做 VLA、不仿真,不走主流路线
陈亦伦和李震宇创立的具身公司它石智航,不做 VLA、不仿真,不走主流路线不做 VLA;不做遥操,以可穿戴设备采真实数据。
来自主题: AI资讯
11150 点击 2026-02-03 08:45
 搜索
搜索
不做 VLA;不做遥操,以可穿戴设备采真实数据。

别让那个CFO跑了。
「脑机接口+具身智能。」
机器人领域是我们长期关注的赛道,而 Generalist 是当前机器人领域中极少数具备长期竞争潜力的公司,核心优势集中在数据规模、团队能力与清晰的 scaling 路径上。
5500台销量背后:揭开宇树人形机器人“真实买家”画像。

Figure 发布 Helix 02,机器人领域又要变天了

马斯克刚刚在特斯拉财报会议上宣布,Model S 和 Model X 两款车型即将在 2026 年第二季度停产,为了给机器人生产腾地。
美国机器人界掌管demo的神,Figure,冷不丁又出一拳!
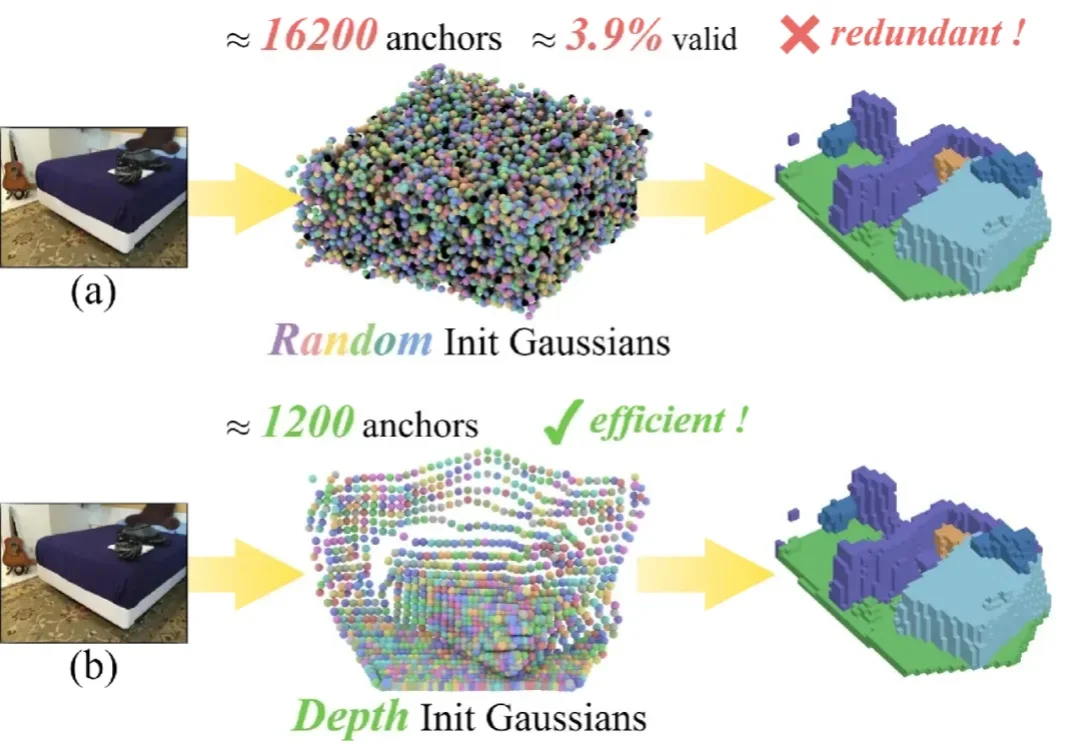
单目 3D 语义场景补全 (Semantic Scene Completion, SSC) 是具身智能与自动驾驶领域的一项核心技术,其目标是仅通过单幅图像预测出场景的密集几何结构与语义标签。

从3000小时到整整20000小时。