
人形机器人控制新突破!敏捷稳定两不误,一个策略让人形机器人完成叶问蹲和跳舞|港大&英伟达&清华
人形机器人控制新突破!敏捷稳定两不误,一个策略让人形机器人完成叶问蹲和跳舞|港大&英伟达&清华叶问蹲、跳舞、跑步,一个策略全搞定!
来自主题: AI技术研报
7759 点击 2025-12-04 10:00
 搜索
搜索
叶问蹲、跳舞、跑步,一个策略全搞定!

创投风口赛道上的具身智能,让垂直场景上的玩家有了「焕新」机遇。
这项工作由伊利诺伊大学香槟分校 (UIUC)、哈佛大学、哥伦比亚大学和麻省理工学院 (MIT) 的合作完成 。

VLA模型性能暴涨300%,背后训练数据还首次实现90%由世界模型生成。

具身智能,火得有些过分, 就在昨天,清华大学宣布成立具身智能与机器人研究院。

鹭羽 发自 凹非寺 量子位 | 公众号 QbitAI 具身智能的风也是卷到高校了。 近期,上海交通大学发布公告,宣布即日起拟增设具身智能本科专业。 环顾全球,目前还没有将具身智能作为独立本科专业开设的
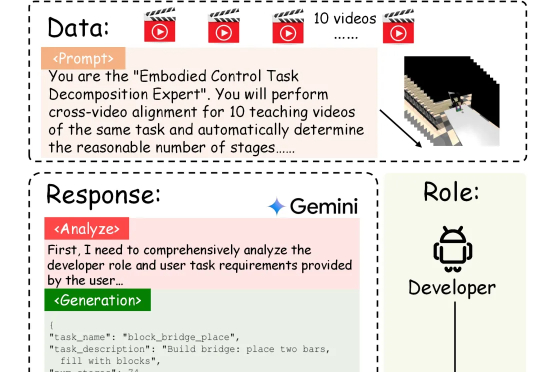
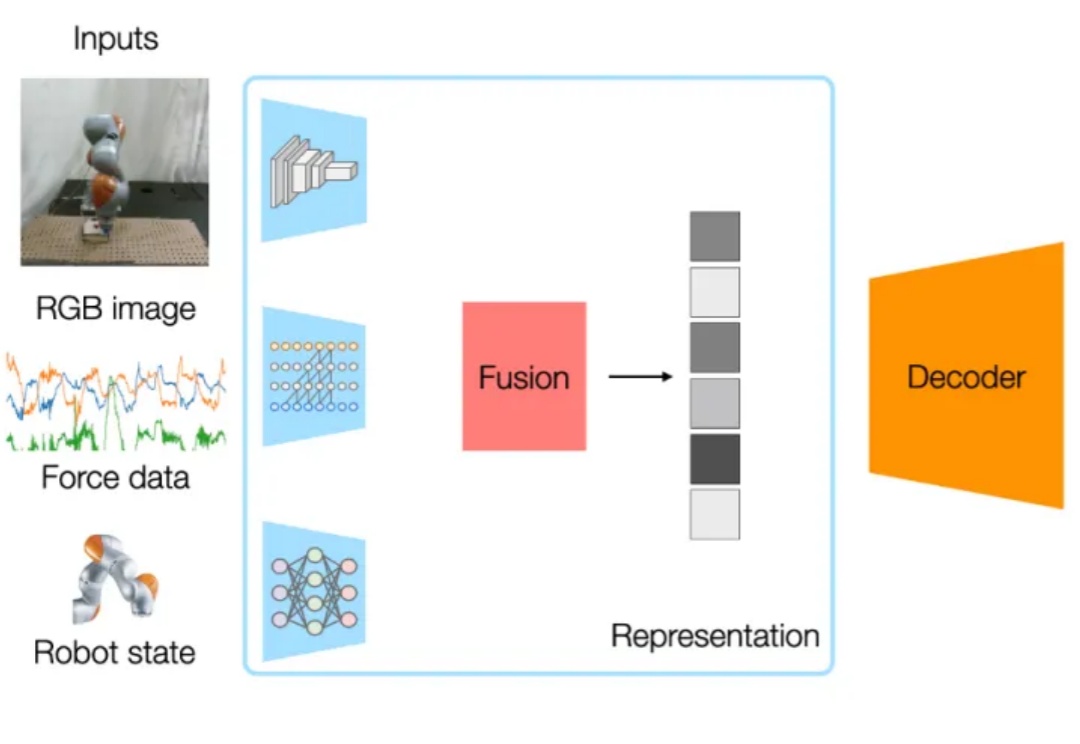
具身智能的「ChatGPT时刻」还没到,机器人的「幻觉」却先来了?在需要几十步操作的长序列任务中,现有的VLA模型经常「假装在干活」,误以为任务完成。针对这一痛点,北京大学团队提出自进化VLA框架EvoVLA。该模型利用Gemini生成「硬负样本」进行对比学习,配合几何探索与长程记忆,在复杂任务基准Discoverse-L上将成功率提升了10.2%,并将幻觉率从38.5%大幅降至14.8%。
当元宇宙数字人急需「群舞技能」,音乐驱动生成技术却遭遇瓶颈——舞者碰撞、动作僵硬、长序列崩坏。为解决这些难题,南理工、清华、南大联合研发端到端模型TCDiff++,突破多人生成技术壁垒,实现高质量、长时序的群体舞蹈自动生成。

两位长期站在具身智能第一线的亲历者,给出了罕见清晰的判断。
乖乖,反正我是被“震”到了。