
首篇具身智能机器人「安全」综述:LLM如何跨越物理鸿沟?
首篇具身智能机器人「安全」综述:LLM如何跨越物理鸿沟?最新综述首次系统探讨LLM控制机器人的安全威胁、防御机制与未来挑战,指出LLM的具身鸿沟导致其在物理空间可能执行危险动作,而现有防御体系存在逻辑与物理脱节等问题。
来自主题: AI技术研报
8674 点击 2026-01-20 16:35
 搜索
搜索
最新综述首次系统探讨LLM控制机器人的安全威胁、防御机制与未来挑战,指出LLM的具身鸿沟导致其在物理空间可能执行危险动作,而现有防御体系存在逻辑与物理脱节等问题。
想象这样一个日常画面:你吩咐家用机器人「烧壶开水」,它却当场卡壳——水壶在哪?该接自来水还是过滤水?先插电还是先按开关?水开了又该如何判断?这些对人类而言像呼吸一样自然的家务,对过去的机器人却是大大的难题:要么忘了插电,要么找不到水壶,甚至会把柜门把手错当成开关一通乱按。
就在刚刚,人形机器人赛道投下了一颗“开源炸弹”。

全球第一个负载50公斤的、真实自主干活的具身智能机器人,已经进宁德时代工厂干活了!
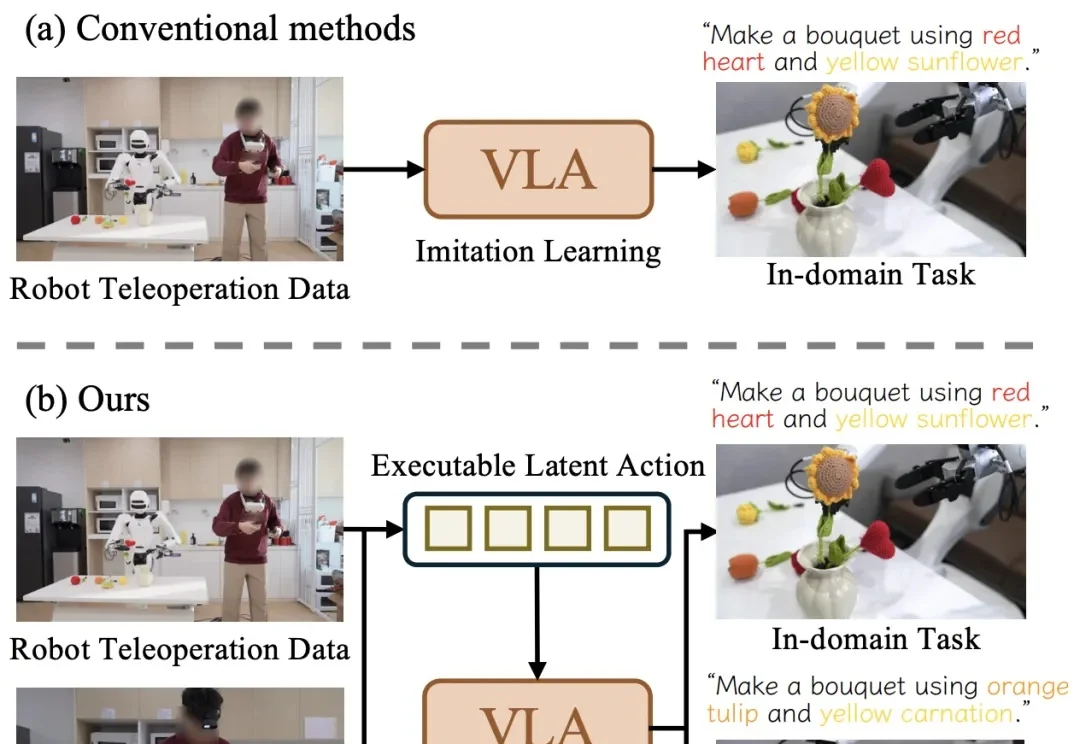
近日,清华大学与星尘智能、港大、MIT 联合提出基于对比学习的隐空间动作预训练(Contrastive Latent Action Pretraining, CLAP)框架。这个框架能够将视频中提纯的运动空间与机器人的动作空间进行对齐,也就是说,机器人能够直接从视频中学习技能!

2025年,风光无限的机器人们在Demo中大秀绝活,从叠衣服、工厂和物流站分拣包裹,到零售店卖货……它们忙碌的身影存在于各种各样的场景中。但回到现实世界,具身智能真正参与的生活和生产环节,却少之又少。
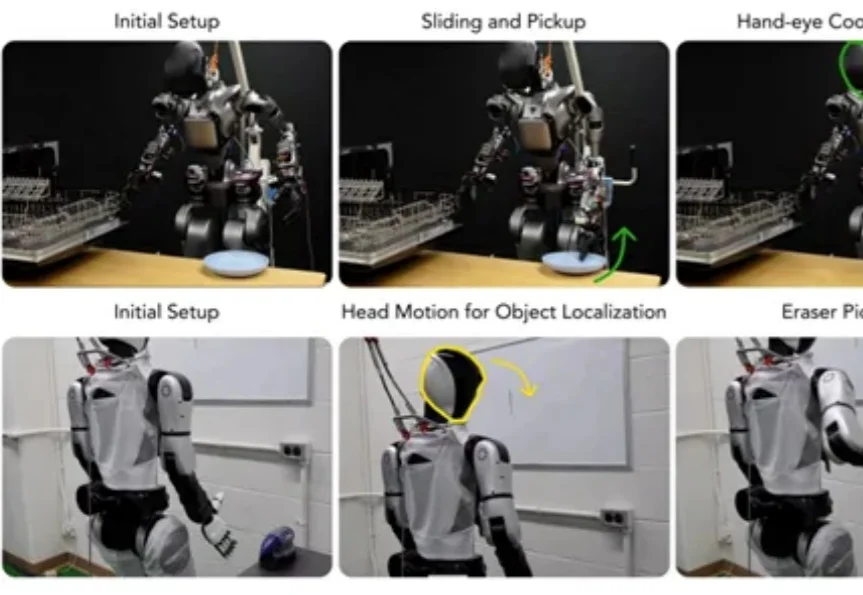
在家庭厨房自主使用洗碗机,在办公室边移动边擦拭白板——这些人类习以为常的场景,对人形机器人来说,却是需要调动全身关节协同运作才能完成的“高难度挑战”。

今日,美国机器人初创公司Skild AI宣布完成约14亿美元(约合人民币97.6亿元)的C轮融资,估值升至超140亿美元(约合人民币976.3亿元),达到7个月前的3倍。
胡宇航(网名 “U 航”),毕业于美国哥伦比亚大学,博士学位,首形科技创始人。长期专注于机器人自主学习的研究工作。研究成果发表于《Nature Machine Intelligence》,《Science Robotics》等国际顶级期刊。

一个背景深厚的新玩家强势入局。