爆发力超越波士顿动力液压机器人,PHYBOT M1实现全球首次全尺寸重型电驱人形机器人完美拟人态后空翻
爆发力超越波士顿动力液压机器人,PHYBOT M1实现全球首次全尺寸重型电驱人形机器人完美拟人态后空翻乖乖,反正我是被“震”到了。
来自主题: AI资讯
10437 点击 2025-11-27 10:39
 搜索
搜索
乖乖,反正我是被“震”到了。
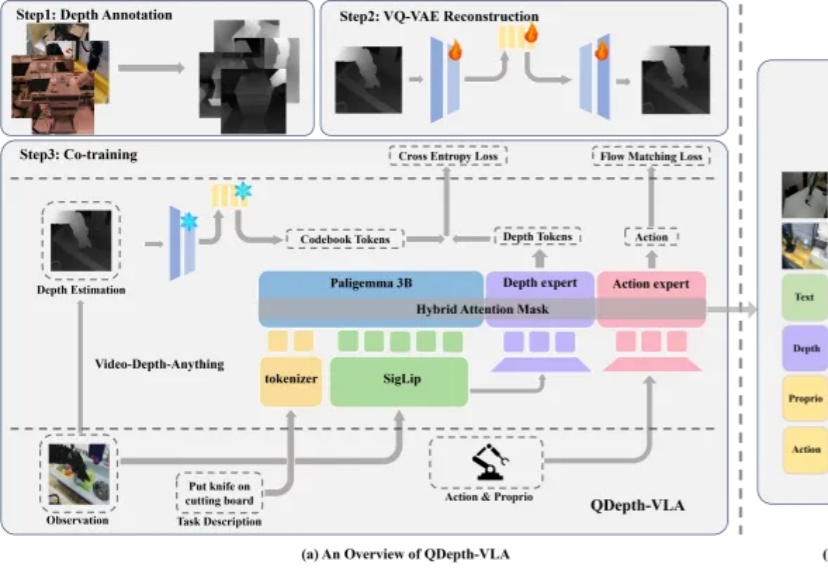
视觉-语言-动作模型(VLA)在机器人操控领域展现出巨大潜力。通过赋予预训练视觉-语言模型(VLM)动作生成能力,机器人能够理解自然语言指令并在多样化场景中展现出强大的泛化能力。然而,这类模型在应对长时序或精细操作任务时,仍然存在性能下降的现象。

OpenAI于2025年11月22号震撼发布GPT-5早期实验报告,揭示了AI从「聊天机器人」向拥有逻辑直觉的「硅基科研员」进化的里程碑式飞跃。从协助破解困扰数学界数十年的Erdős谜题,到将数月的生物实验推理压缩至几分钟,GPT-5展现了惊人的跨学科洞察力与推理质变。这份报告宣告了AI4S时代的降临:AI是科学家手中那架穿透未知迷雾的「认知望远镜」。

聚焦新加坡 如今,中新两国都在大力加码AI。新加坡总理多次强调AI是国家战略重点,也在积极吸引全球人才;中国AI企业和技术也在快速“出海”,更有中国AI煎饼机器人入驻新加坡引爆潮流~ 而最近,AI圈更

美国加州大学圣地亚哥分校(UCSD)徐升教授对 DeepTech 表示:“很荣幸我们的工作成为 Nature Sensors 期刊的首篇论文,我们第一次通过 AI 的方法实现了在动态下抗运动伪影的人机交互,应用场景包括可穿戴和移动设备的手势控制、机器人遥操作、AR/VR 动作追踪、游戏、康复与辅助设备、工业与军事训练、健康与运动监测、
灵心巧手创始人兼CTO周永对《智能涌现》透露,目前公司月订单现已突破千台,海外客户已包括三星、西门子等科技公司。

33岁,A股上市公司董事长!B站百大up主“稚晖君”,又更上了一层楼。
具身智能赛道又迎来新的融资消息。

1米3的机器人小土豆,三步上篮也可以如此丝滑。

具身智能要想往大规模应用走,像英特尔这样的头部芯片公司必须突破算力架构。