
离谱!马斯克的 AI 教人暗杀马斯克?Grok 37 万条聊天记录意外泄露
离谱!马斯克的 AI 教人暗杀马斯克?Grok 37 万条聊天记录意外泄露Grok 又双叒叕捅娄子了。 在用户完全不知情的情况下,马斯克旗下 AI 聊天机器人 Grok 将数十万条用户聊天记录公开发布,并被 Google 等搜索引擎全网收录。
来自主题: AI资讯
10147 点击 2025-08-21 16:51
 搜索
搜索
Grok 又双叒叕捅娄子了。 在用户完全不知情的情况下,马斯克旗下 AI 聊天机器人 Grok 将数十万条用户聊天记录公开发布,并被 Google 等搜索引擎全网收录。

这辈子,咱也是被人形机器人夹道欢迎过了!

注意看,这个人形机器人在室内四处搜寻。 只因刚刚听到人类指令:请你走到足球的位置。

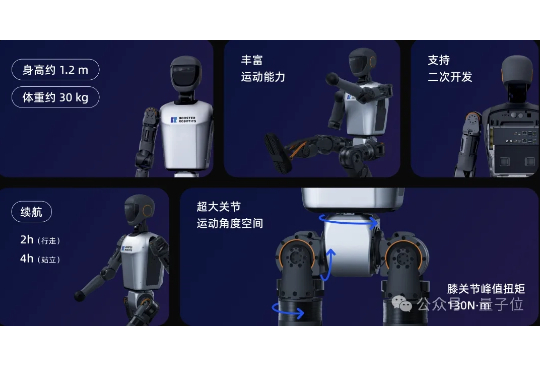
敏捷、优雅。 宇树用这两个词来形容自家最新人形机器人

00后AI创业潮来袭!华人女生MIT辍学创业,拿下融资2100万美元(折合人民币1.5亿元)。 公司直接剑指RPA(机器人流程自动化)界的Copilot。
Vibe Coding的概念已经火了一段时间,因为之前在学校课程里尝试过用生成式人工智能做了一个聊天机器人,过程很顺利,做完很有成就感,所以觉得自己其实可以尝试一下用人工智能(AI)手搓一个APP。

早在"AI Agent"这一术语出现之前,安娜·摩纳哥(Anna Monaco)就已经开始构建 AI Agent系统。在开发了众多聊天机器人后,她开始寻找更适合 AI Agent的其他交互界面,最终将目光锁定在了电子表格上。
男篮亚洲杯中国队1分憾负澳大利亚,但另一边绿茵场上,中国机器人传来好消息: 1-0战胜人形机器人版德国战车,再次将世界冠军收入囊中。

好家伙,昨晚躺在床上无所事事的刷着视频,瞬间被眼前的这个机器人笑精神了。

智东西8月17日报道,今天,世界人形机器人运动会医药场景药物分拣比赛决赛落下帷幕。从初赛到复赛,银河通用Galbot队全程零遥操作、完全自主运行,预赛、复赛及决赛均为第一,最终以10分22秒用时,336分的总赋分夺得本场赛事冠军。