盛大AI研究院新作:流式生成超越非流式,一句话让虚拟人动作丝滑如真,推理延迟仅1帧
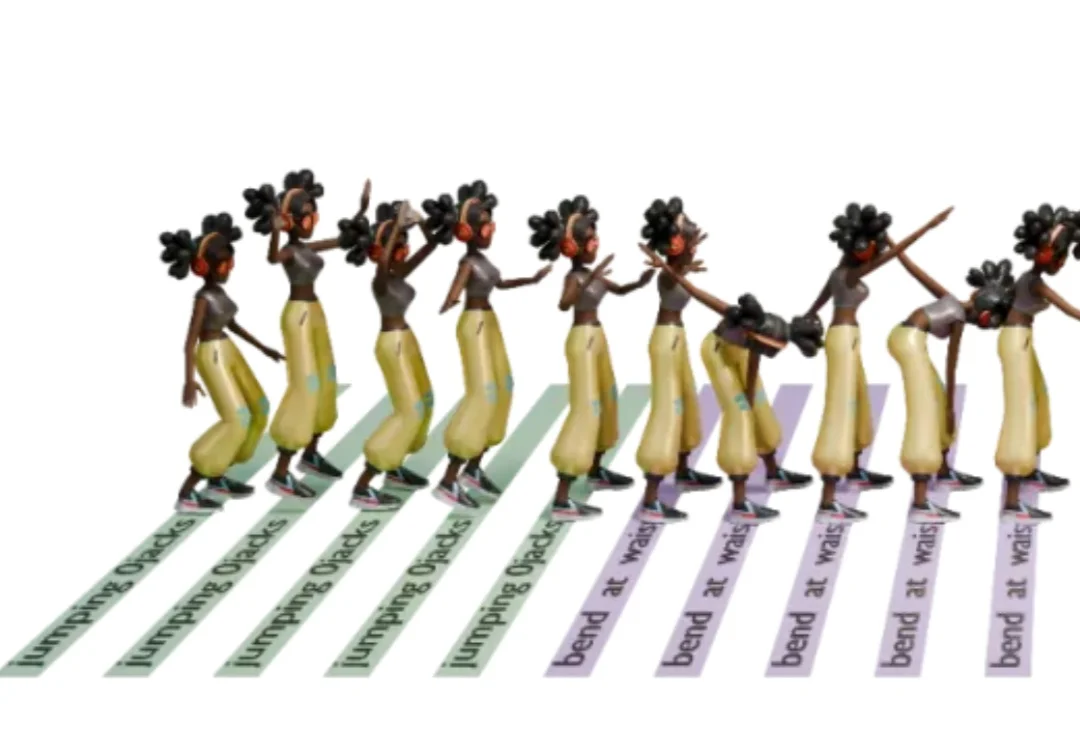
盛大AI研究院新作:流式生成超越非流式,一句话让虚拟人动作丝滑如真,推理延迟仅1帧文本驱动的人体动作生成是游戏NPC、虚拟主播、机器人控制等实时交互系统的核心技术。
来自主题: AI技术研报
6622 点击 2026-04-14 14:58
 搜索
搜索
文本驱动的人体动作生成是游戏NPC、虚拟主播、机器人控制等实时交互系统的核心技术。
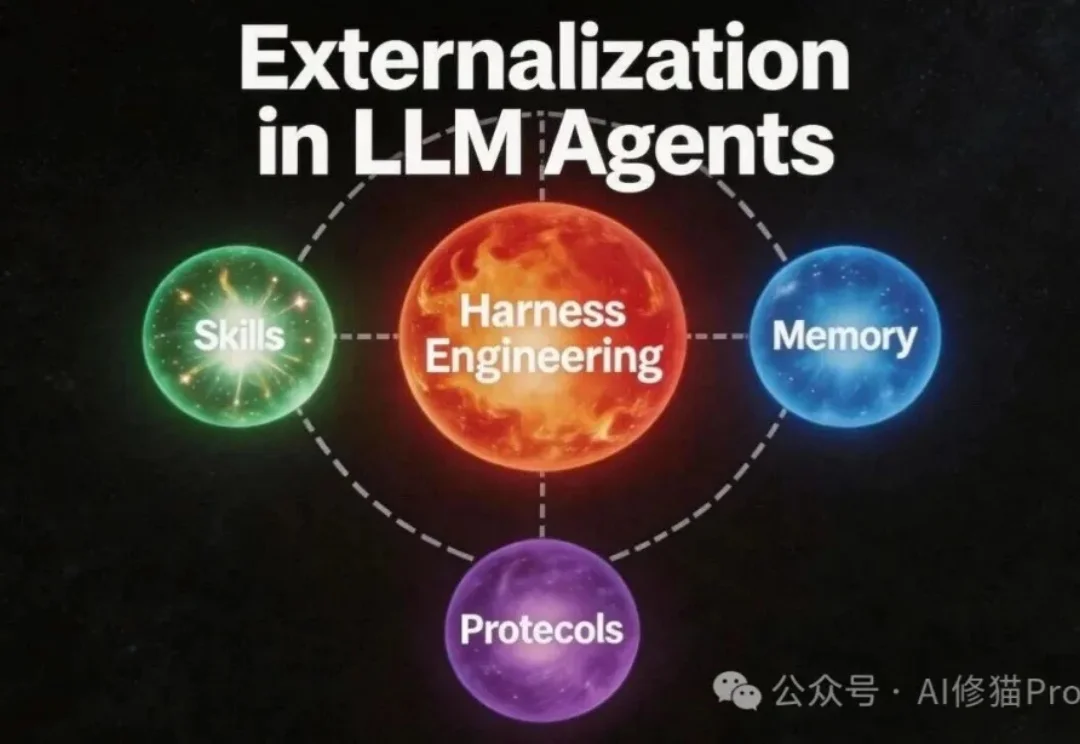
2026年再看Agent,一个越来越难回避的事实是:能力正在从模型里流到模型外。真正决定系统上限的,不再只是参数、Prompt和tool calling,而是记忆、技能、协议以及统摄这一切的harness。
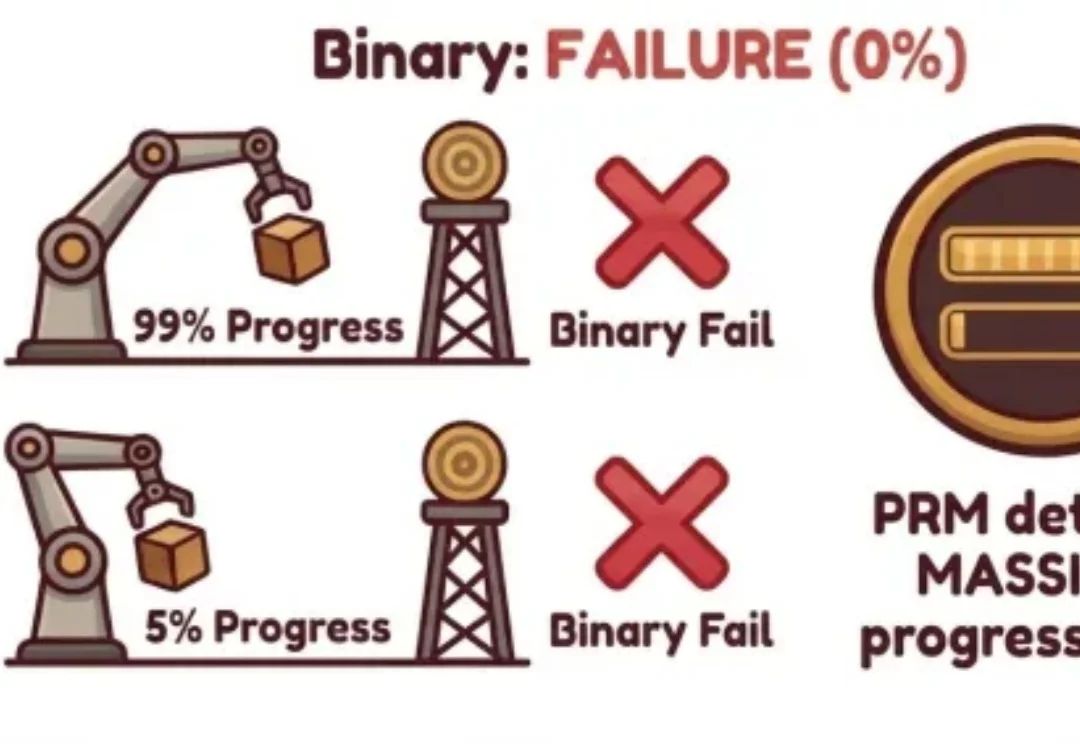
随着机器人操作从短程、单步技能逐步走向长程、富接触、需要持续协调与恢复能力的复杂任务,传统以二元成功率为核心的评测方式开始暴露出明显局限。它能够回答 “任务是否完成”,却难以回答 “策略推进到了哪里”“执行过程是否高效稳定”“失败究竟发生在什么阶段”。

太疯狂了!Meta和METR刚测出的AI进化数据,与中国团队两年前提出的「密度定律」完美重合。硅谷猛然回头,发现中国研究者在这条路上已领先两年!
Google DeepMind调查了一万个人,结果让整个AI安全评估体系汗颜:AI做了三倍多的「坏事」,但造成的实际伤害几乎一样。这意味着,我们现在用来证明AI安全的那套逻辑,可能从一开始就是错的。
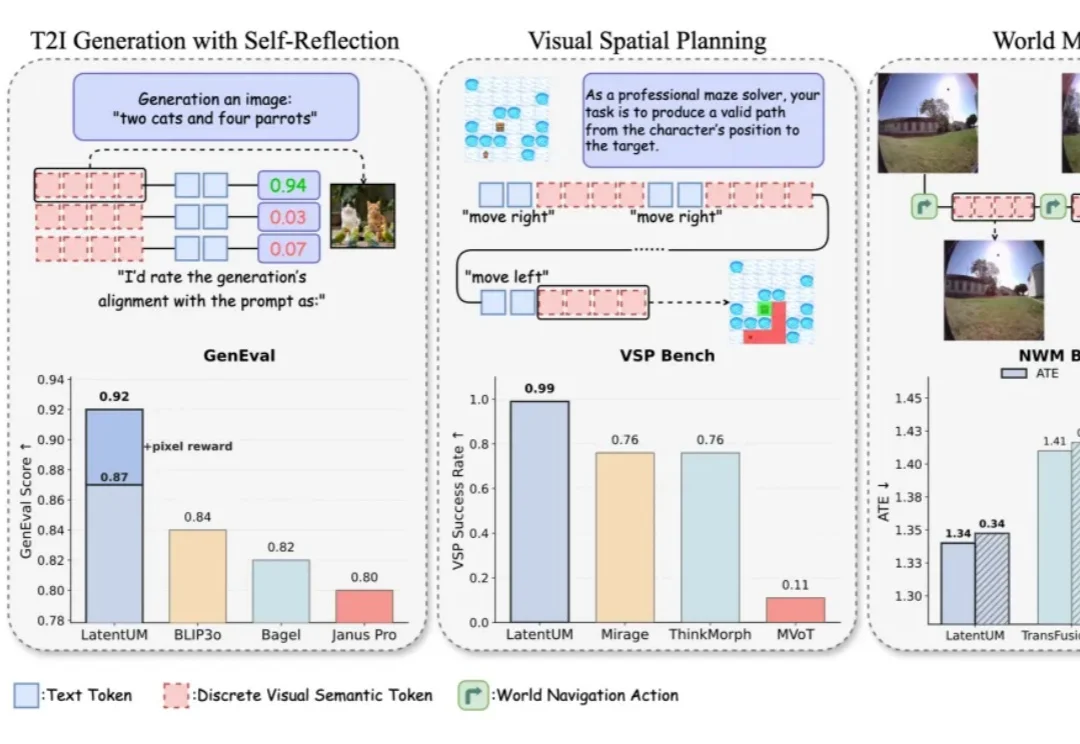
过去一段时间,生成理解统一模型(Unified Model)经常被理解成一种「既能看懂图、又能生成图」的多模态通用系统。
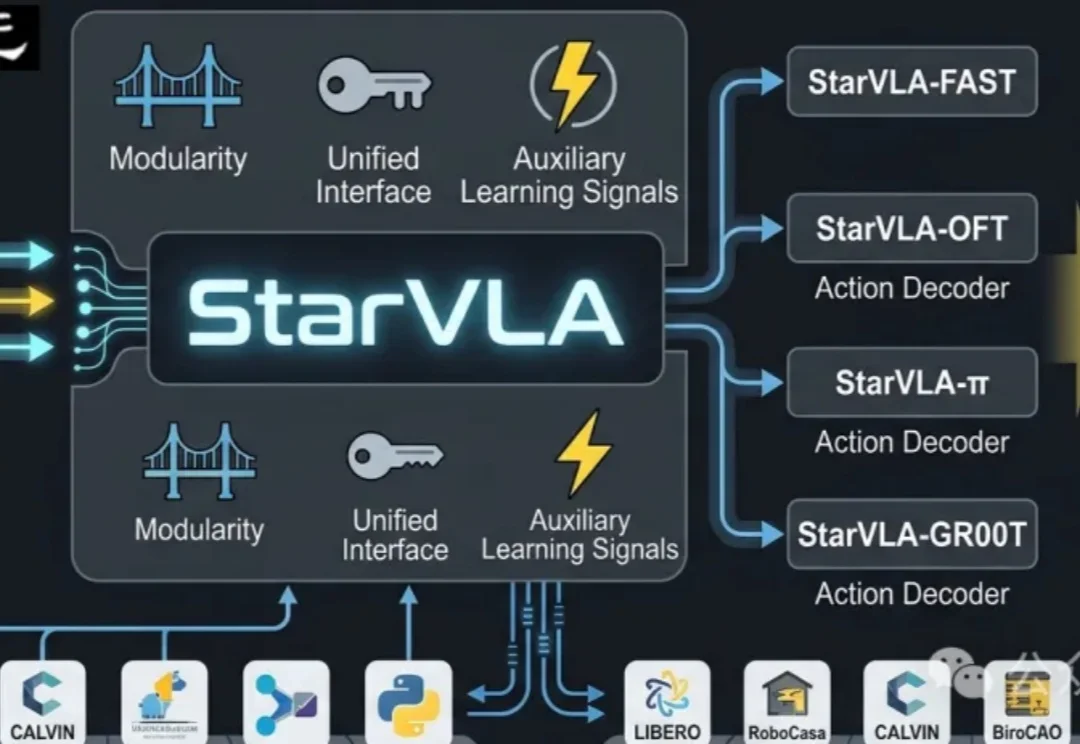
当前具身智能的VLA(Vision-Language-Action)赛道正陷入典型的「碎片化」泥潭:不同团队采用异构的动作解码范式、强耦合的数据管线、互不兼容的评测协议,导致方法难以横向对比,复现成本极高。
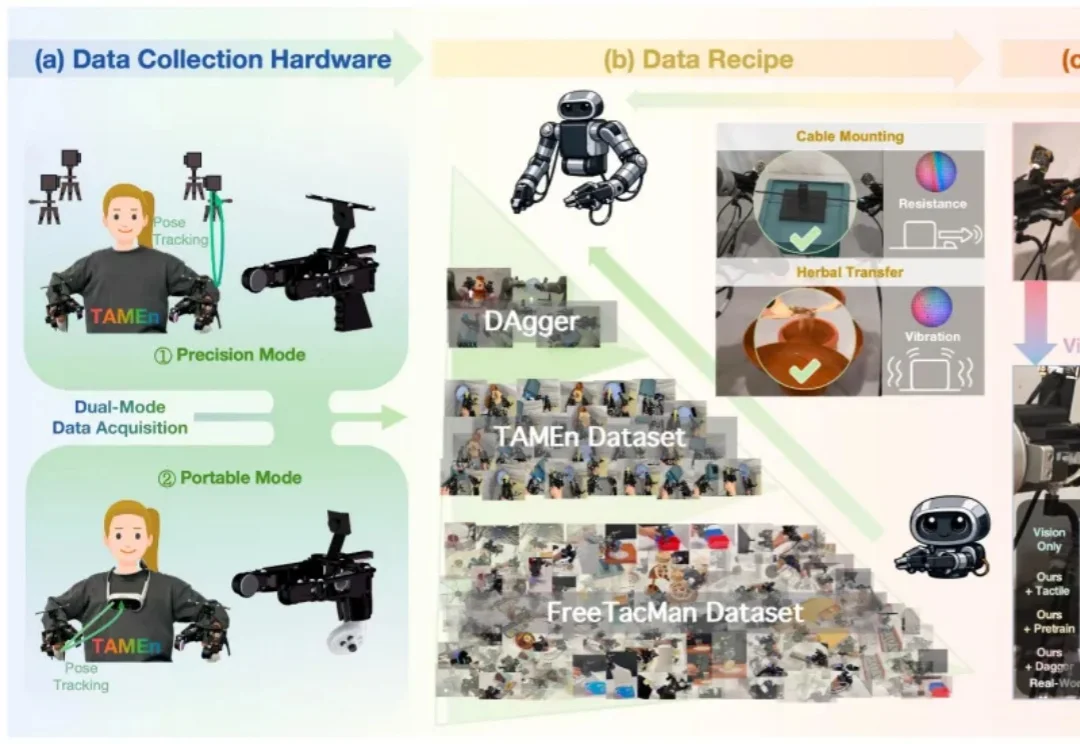
在具身智能快速发展的今天,高质量数据已成为驱动能力提升的关键基础,然而一个核心问题也随之而来: 如何让机器人数据采集更快、更稳、更有效?
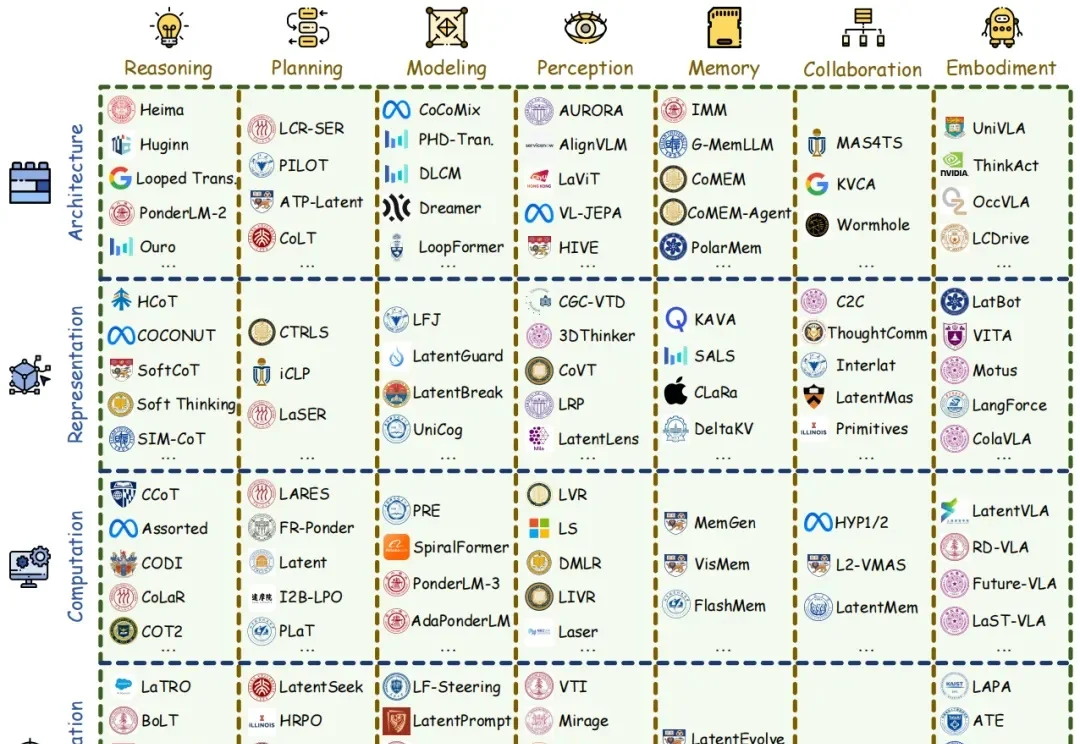
从 2024 年底的关于潜在空间的早期探索,再到 2025 年底和 2026 年初的相关研究爆发,潜空间范式正在彻底重塑大模型 (LLMs, VLMs, VLAs 等延伸模型) 的底层设计逻辑。

随着任务的复杂度提升,Agent(智能体)的上下文在无限膨胀。在无穷的历史对话、工具调用输出、中间步骤以及报错信息中,模型迷糊了,于是开始跳步、忽视、绕道。