CVPR 2025 | 2D 大模型赋能3D Affordance 预测,GEAL助力可泛化的3D场景可交互区域识别
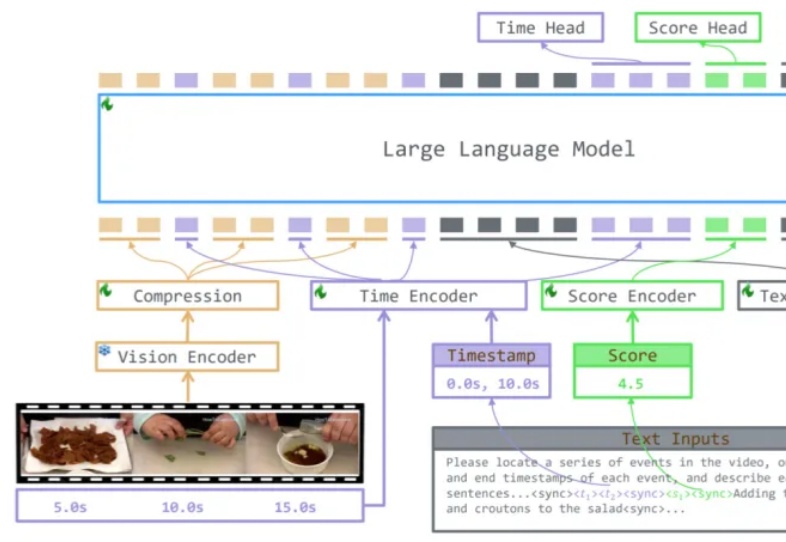
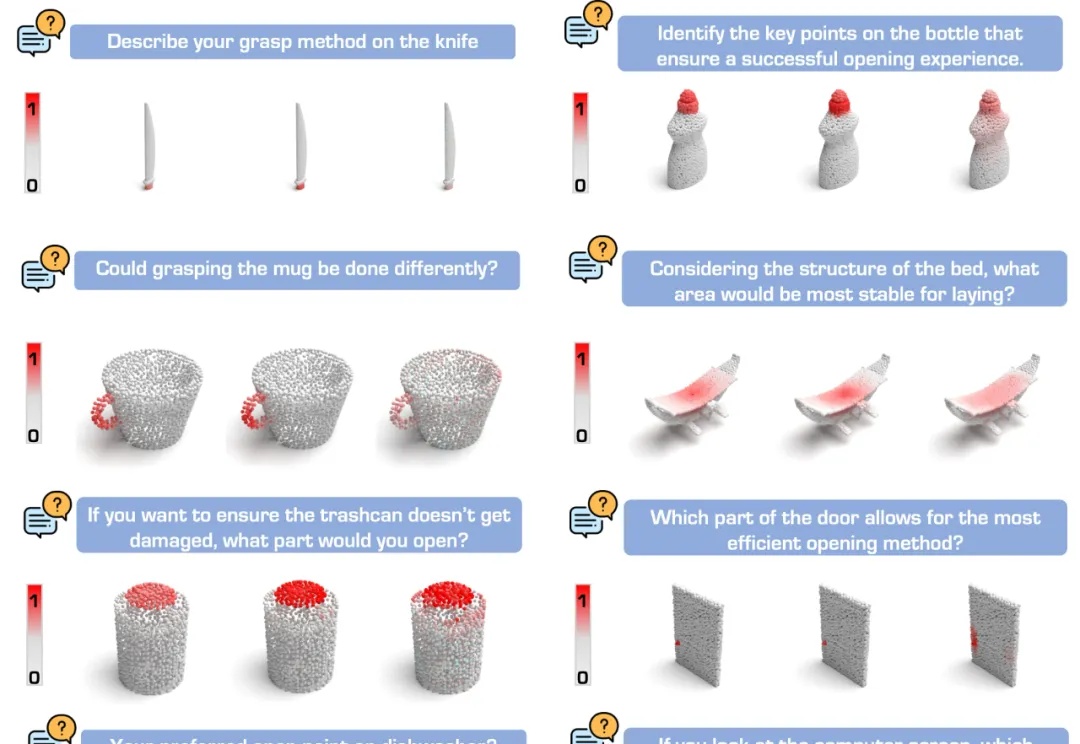
CVPR 2025 | 2D 大模型赋能3D Affordance 预测,GEAL助力可泛化的3D场景可交互区域识别在现实世界中,如何让智能体理解并挖掘 3D 场景中可交互的部位(Affordance)对于机器人操作与人机交互至关重要。所谓 3D Affordance Learning,就是希望模型能够根据视觉和语言线索,自动推理出物体可供哪些操作、以及可交互区域的空间位置,从而为机器人或人工智能系统提供对物体潜在操作方式的理解。
来自主题: AI技术研报
6310 点击 2025-04-11 09:55