脑子比不过AI,手也要沦陷了?这只灵巧手看得我有点慌
脑子比不过AI,手也要沦陷了?这只灵巧手看得我有点慌在「用进废退」原则的驱动下,拇指逐渐变长且肌肉发达,能够与其他手指精准对握,实现精细操作。手部由多个关节组成,具有高度灵活性,可完成捏、握、夹等多种动作。此外,手部皮肤富含触觉感受器,能够感知压力、温度和纹理等信息,为操作提供精准反馈。
来自主题: AI技术研报
8880 点击 2025-08-11 14:01
 搜索
搜索
在「用进废退」原则的驱动下,拇指逐渐变长且肌肉发达,能够与其他手指精准对握,实现精细操作。手部由多个关节组成,具有高度灵活性,可完成捏、握、夹等多种动作。此外,手部皮肤富含触觉感受器,能够感知压力、温度和纹理等信息,为操作提供精准反馈。

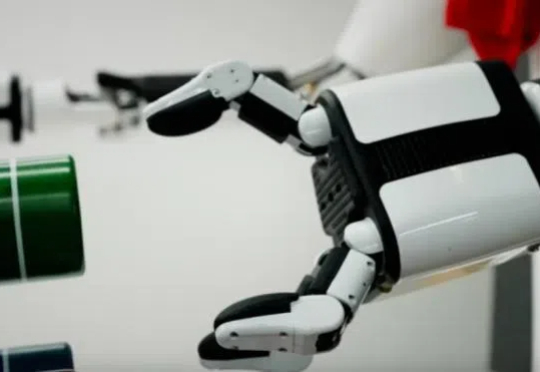
每只手21个自由度,支持16主动自由度,具备高精度操作能力。
近年来,具身智能领域发展迅猛,使机器人在复杂任务中拥有接近人类水平的双手操作能力,不仅具有重要的研究与应用价值,也是迈向通用人工智能的关键一步。
从炫技走向应用,“灵巧手”成机器人关键拼图
本期,我们邀请到了灵巧手公司 Dexmate 的创始人陈涛和秦誉哲。两位分别在上海交通大学、麻省理工学院(MIT)、卡内基梅隆大学(CMU)和加州大学圣地亚哥分校(UCSD)等知名院校的顶尖实验室积累了丰富的研究经验。这些经历不仅为他们提供了扎实的技术基础,也让他们对产业需求有了深入的理解。

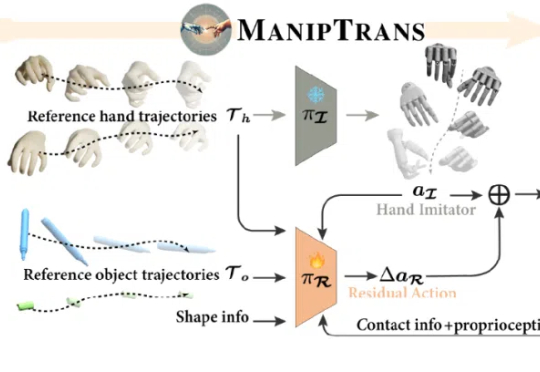
只凭同一个原生机器人大模型,五指灵巧手就能学会100多个复杂操作任务。
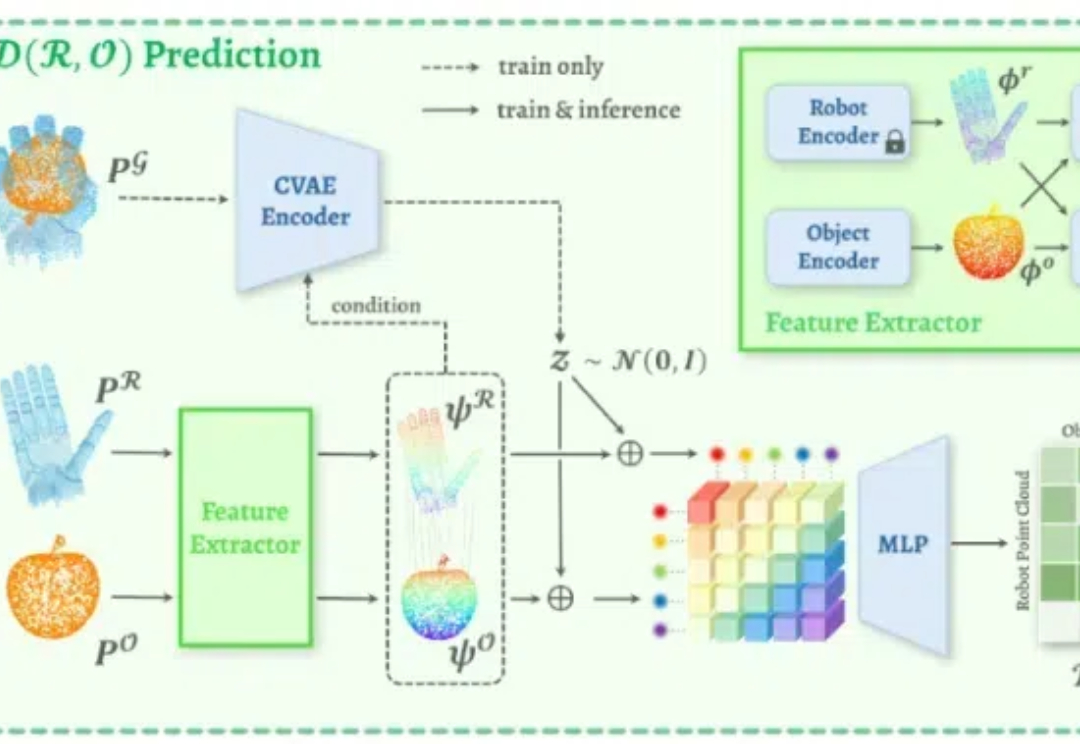
近期,新加坡国立大学计算机学院的邵林团队提出了 D(R,O) Grasp:一种面向跨智能体灵巧抓取的机器人与物体交互统一表示。该方法通过创新性地建模机器人手与物体在抓取姿态下的交互关系,成功实现了对多种机器人手型与物体几何形状的高度泛化能力,为灵巧抓取技术的未来开辟了全新的方向。
马斯克亲自站台,2000多万网友热闹围观Optimus新灵巧手整活——
最近,Jim Fan参与的一项研究推出了自动化数据生成系统DexMimicGen。该系统可基于少量人类演示,合成类人机器人的灵巧手运动轨迹,解决了训练数据集的获取难题,而且还提升了实验中机器人的表现。
在机器人研究领域,抓取任务始终是机器人操作中的一个关键问题。这项任务的核心目标是控制机械手移动到合适位置,并完成对物体的抓取。近年来,基于学习的方法在提高对不同物体的抓取的泛化能力上取得了显著进展,但针对机械手本身,尤其是复杂的灵巧手(多指机械手)之间的泛化能力仍然缺乏深入研究。由于灵巧手在不同形态和几何结构上存在显著差异,抓取策略的跨手转移一直存在挑战。