
CVPR 25 |全面提升视觉感知鲁棒性,生成模型快速赋能三维检测
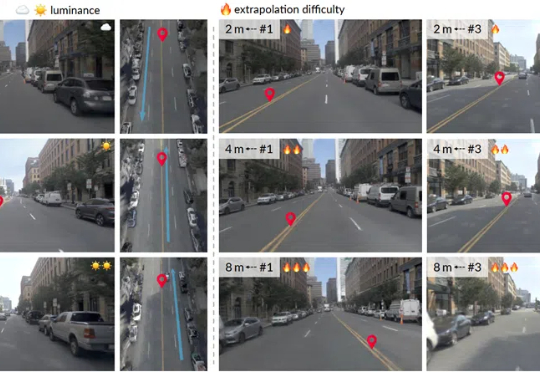
CVPR 25 |全面提升视觉感知鲁棒性,生成模型快速赋能三维检测来自香港中文大学(深圳)等单位的学者们提出了一种名为 DriveGEN 的无训练自动驾驶图像可控生成方法。该方法无需额外训练生成模型,即可实现训练图像数据的可控扩充,从而以较低的计算资源成本提升三维检测模型的鲁棒性。
来自主题: AI技术研报
9316 点击 2025-05-23 14:09
 搜索
搜索
来自香港中文大学(深圳)等单位的学者们提出了一种名为 DriveGEN 的无训练自动驾驶图像可控生成方法。该方法无需额外训练生成模型,即可实现训练图像数据的可控扩充,从而以较低的计算资源成本提升三维检测模型的鲁棒性。

2025 年,人工智能已经不再只是前沿科技圈的热词,而是真真正正地走进了我们的日常:生成图像、写代码、自动驾驶、医疗诊断……几乎每个行业都在讨论 AI,拥抱 AI。

具身智能的突破离不开高质量数据。目前,具身合成数据有两条主要技术路线之争:“视频合成+3D重建”or “端到端3D生成”。英伟达在CES 2025指出“尚无互联网规模的机器人数据”,自动驾驶已具备城市级仿真,但家庭等复杂室内环境缺乏3D合成平台。
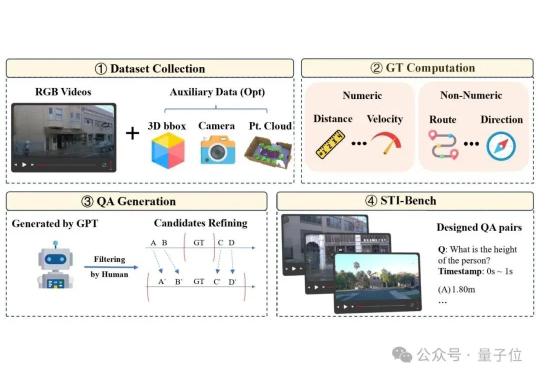
多模态大语言模型(MLLM)在具身智能和自动驾驶“端到端”方案中的应用日益增多,但它们真的准备好理解复杂的物理世界了吗?
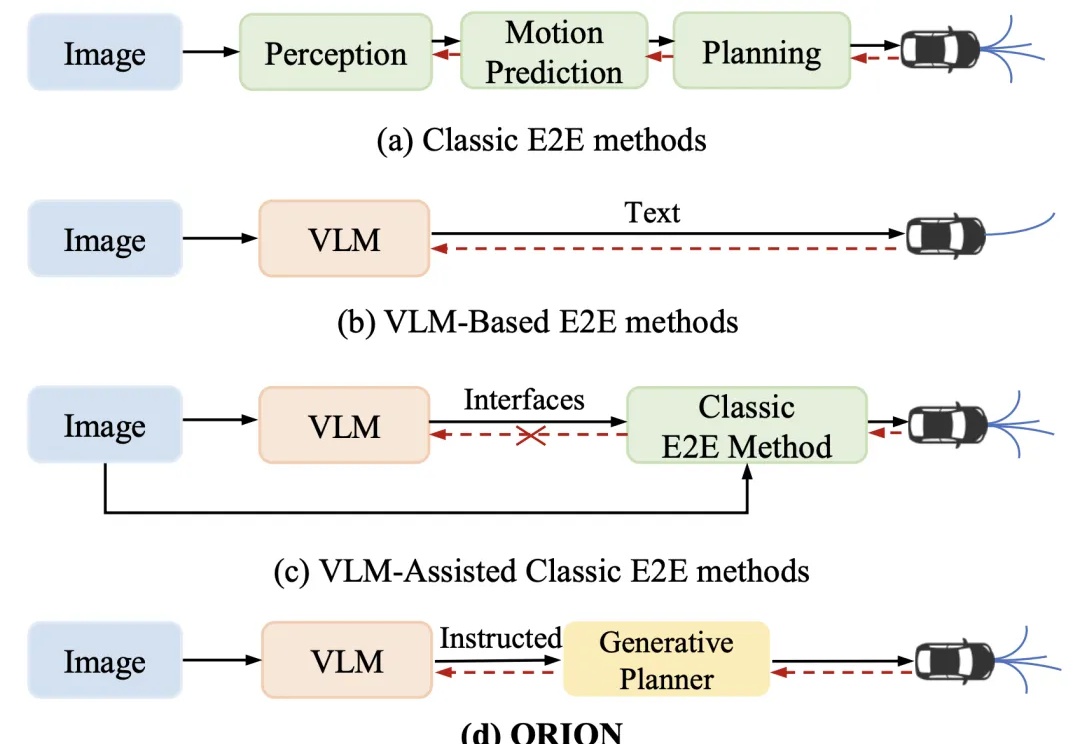
近年来,端到端(End-to-End,E2E)自动驾驶技术不断进步,但在复杂的闭环交互环境中,由于其因果推理能力有限,仍然难以做出准确决策。虽然视觉 - 语言大模型(Vision-Language Model,VLM)凭借其卓越的理解和推理能力,为端到端自动驾驶带来了新的希望,但现有方法在 VLM 的语义推理空间和纯数值轨迹的行动空间之间仍然存在巨大鸿沟。
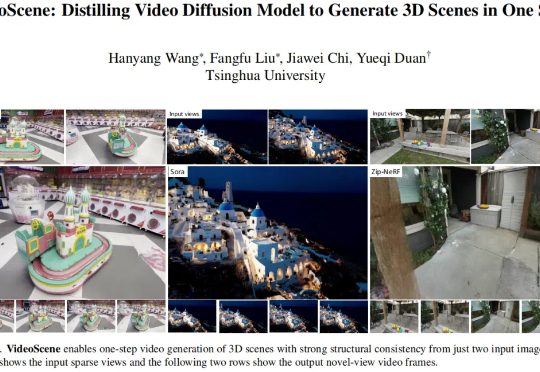
随着 VR/AR、游戏娱乐、自动驾驶等领域对 3D 场景生成的需求不断攀升,从稀疏视角重建 3D 场景已成为一大热点课题。
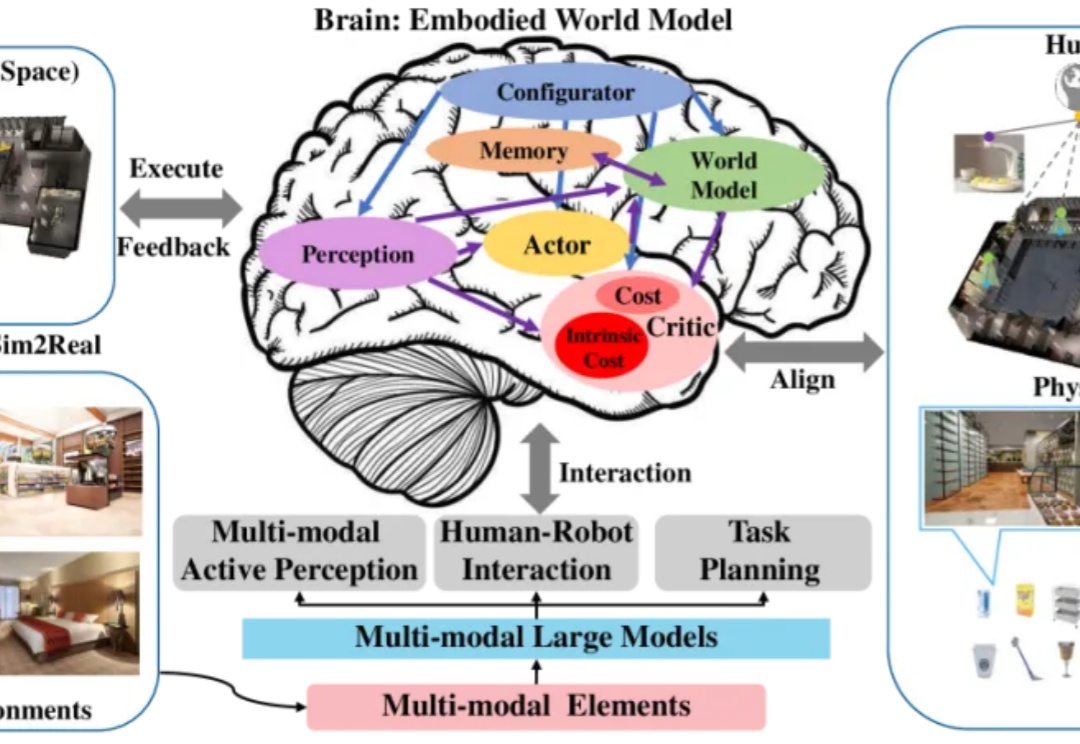
本文主要描述了具身合成数据两条主要技术路线之争:“视频合成+3D重建”or “端到端3D生成”。参考自动驾驶的成功经验,前者模态转换链路过长导致误差累积,'直接合成3D数据'理论上有信息效率优势,但需要克服“常识欠缺”等挑战。
在自动驾驶领域,高精度仿真系统扮演着 “虚拟练兵场” 的角色。工程师需要在数字世界中模拟暴雨、拥堵、突发事故等极端场景,反复验证算法的可靠性。
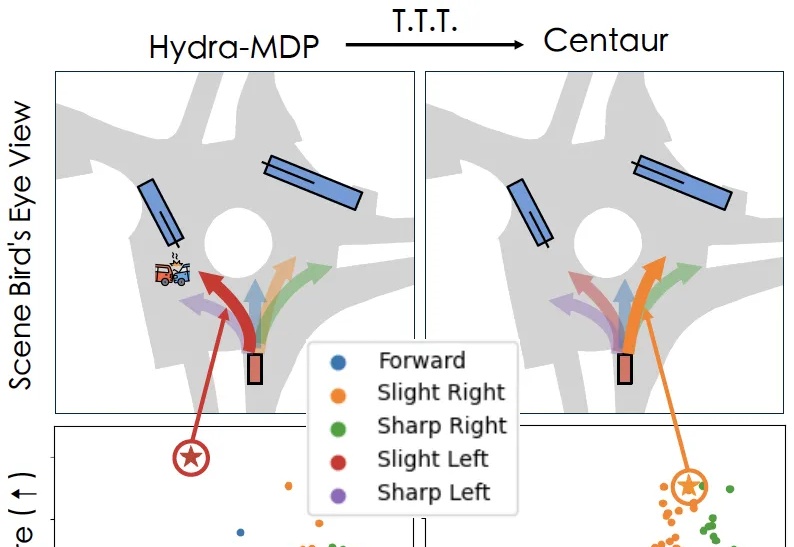
当开车遇到变道、加塞等场景时,驾驶员往往会下意识地激活自己的“安全驾驶思维”,从而做出激进的规避行为。
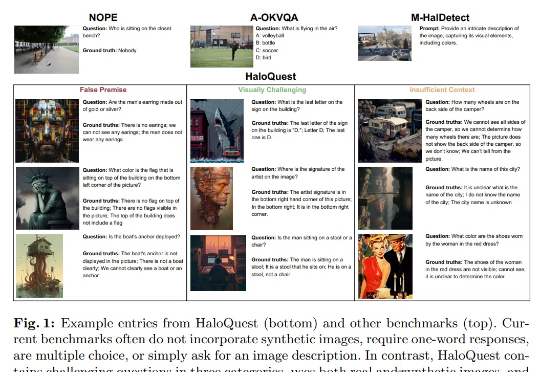
幻觉(Hallucination),即生成事实错误或不一致的信息,已成为视觉-语言模型 (VLMs)可靠性面临的核心挑战。随着VLMs在自动驾驶、医疗诊断等关键领域的广泛应用,幻觉问题因其潜在的重大后果而备受关注。