上交研究登Nature大子刊!可微分物理首次突破端到端无人机高速避障
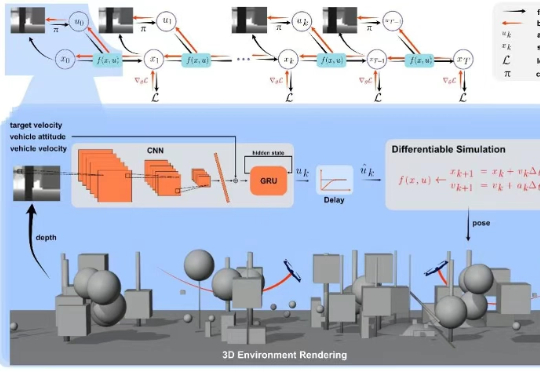
上交研究登Nature大子刊!可微分物理首次突破端到端无人机高速避障上海交通大学研究团队提出了一种融合无人机物理建模与深度学习的端到端方法,该研究首次将可微分物理训练的策略成功部署到现实机器人中,实现了无人机集群自主导航,并在鲁棒性、机动性上大幅领先现有的方案。
来自主题: AI技术研报
8621 点击 2025-07-08 11:54
 搜索
搜索
上海交通大学研究团队提出了一种融合无人机物理建模与深度学习的端到端方法,该研究首次将可微分物理训练的策略成功部署到现实机器人中,实现了无人机集群自主导航,并在鲁棒性、机动性上大幅领先现有的方案。
最近的一篇论文中,来自人大和腾讯的研究者们的研究表明,语言模型对强化学习中的奖励噪音具有鲁棒性,即使翻转相当一部分的奖励(例如,正确答案得 0 分,错误答案得 1 分),也不会显著影响下游任务的表现。

来自香港中文大学(深圳)等单位的学者们提出了一种名为 DriveGEN 的无训练自动驾驶图像可控生成方法。该方法无需额外训练生成模型,即可实现训练图像数据的可控扩充,从而以较低的计算资源成本提升三维检测模型的鲁棒性。
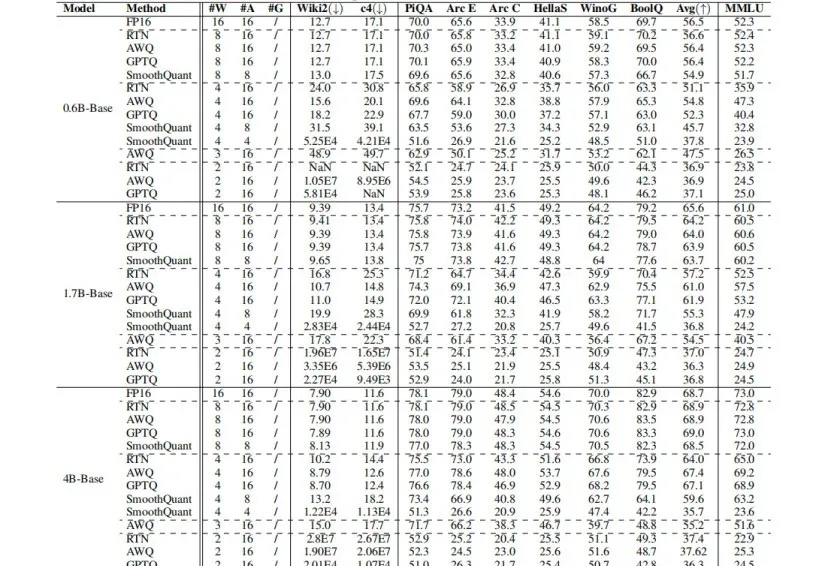
Qwen3强势刷新开源模型SOTA,但如何让其在资源受限场景中,既能实现低比特量化,又能保证模型“智商”不掉线?
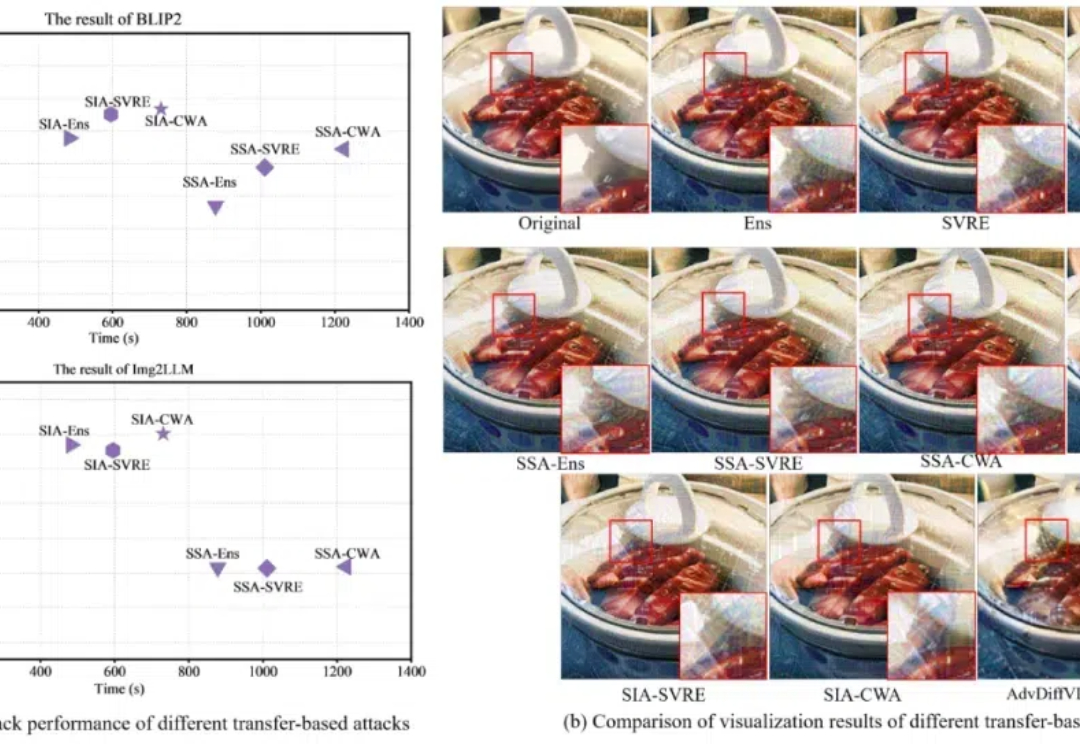
对抗攻击,特别是基于迁移的有目标攻击,可以用于评估大型视觉语言模型(VLMs)的对抗鲁棒性,从而在部署前更全面地检查潜在的安全漏洞。然而,现有的基于迁移的对抗攻击由于需要大量迭代和复杂的方法结构,导致成本较高
近日,中科大王杰教授团队 (MIRA Lab) 针对离线强化学习数据集存在多类数据损坏这一复杂的实际问题,提出了一种鲁棒的变分贝叶斯推断方法,有效地提升了智能决策模型的鲁棒性,为机器人控制、自动驾驶等领域的鲁棒学习奠定了重要基础。论文发表在 CCF-A 类人工智能顶级会议 Neural Information Processing Systems(NeurIPS 2024)。
机器人控制和自动驾驶的离线数据损坏问题有解了! 中科大王杰教授团队 (MIRA Lab) 提出了一种变分贝叶斯推断方法,有效地提升了智能决策模型的鲁棒性。
Robin3D通过鲁棒指令数据生成引擎(RIG)生成的大规模数据进行训练,以提高模型在3D场景理解中的鲁棒性和泛化能力,在多个3D多模态学习基准测试中取得了优异的性能,超越了以往的方法,且无需针对特定任务的微调。
DeepMind最近的研究提出了一种新框架AligNet,通过模拟人类判断来训练教师模型,并将类人结构迁移到预训练的视觉基础模型中,从而提高模型在多种任务上的表现,增强了模型的泛化性和鲁棒性,为实现更类人的人工智能系统铺平了道路。
视觉 / 激光雷达里程计是计算机视觉和机器人学领域中的一项基本任务,用于估计两幅连续图像或点云之间的相对位姿变换。它被广泛应用于自动驾驶、SLAM、控制导航等领域。最近,多模态里程计越来越受到关注,因为它可以利用不同模态的互补信息,并对非对称传感器退化具有很强的鲁棒性。