# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
一个 token 就能控制模型快些解答或慢点思考。
OpenAI ο1 模型的发布掀起了人们对 AI 推理过程的关注,甚至让现在的 AI 行业开始放弃卷越来越大的模型,而是开始针对推理过程进行优化了。今天我们介绍的这项来自 Meta FAIR 田渊栋团队的研究也是如此,其从人类认知理论中获得了灵感,提出了一种新型 Transformer 架构:Dualformer。
根据人类认知理论,人类的思考受到两个系统控制:
近期有研究表明,如果将系统 2 过程整合进 Transformer 和大型语言模型中,就能显著提升它们的推理能力。尽管如此,如果模型只是模仿系统 2 式的思考过程,那就需要远远更高的计算成本才能完成,同时响应速度也会大幅减慢。
在研究这一难题时,田渊栋团队得到了一项惊人发现:在解决推理任务时,一种简单的数据方案就足以实现即时动态的系统 1 和系统 2 配置。
基于此发现,他们提出了 Dualformer。这是一种可以轻松配置的 Transformer—— 用户可以指定在推理过程中使用快速或慢速模式,在未指定时模型也可以自行决定。
具体而言,为了模仿系统 2 推理过程,他们让 Transformer 在包含推理轨迹和最终解答的数据上进行训练。利用推理步骤的结构,他们设计了特定的轨迹丢弃策略,使得生成的轨迹类似于系统 1 在思考过程中采取的捷径。在极端情况下,会丢弃整个轨迹并鼓励 Transformer 绕过所有中间步骤,直接输出最终解答。在训练时,他们的策略是随机选择这些结构化的轨迹丢弃策略。
他们的这项研究基于田渊栋团队之前的另一项研究《Beyond A*: Better planning with transformers via search dynamics bootstrapping》,参阅机器之心报道《补齐 Transformer 规划短板,田渊栋团队的 Searchformer 火了》。为了执行规划,他们要训练一个 Transformer 来建模一个 token 序列,而该序列则是以顺序方式来表示该规划任务、A* 算法的计算、由 A* 搜索得到的最优解。
图 3.1 展示了其 token 化方法,其中示例是一个 3×3 迷宫的导航任务,目标是找到从起点到目标单元格的最短路径。
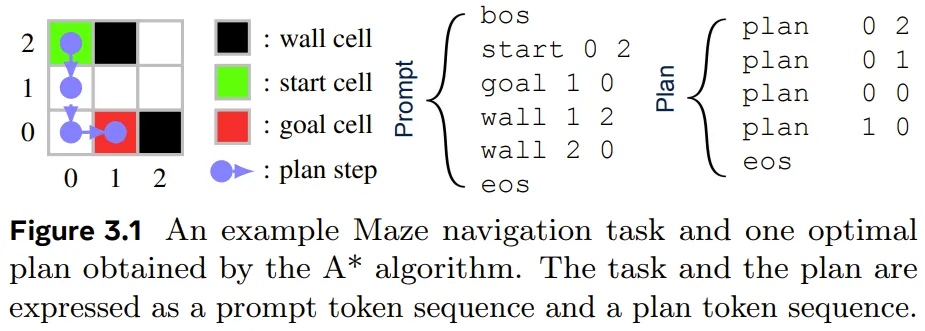
A* 算法已经成功找到了最佳规划。这里使用一个 token 序列来表示该任务和迷宫结果,其也被用作 Dualformer 的提示词。该解答由使用坐标描述路径的规划 token 序列描述。A* 算法生成一个搜索轨迹序列,记录执行的搜索动态,如图 4.1 所示。
回想一下,A* 算法是一种在加权图上的寻路算法。create 子句将节点(由后续坐标表示)添加到搜索边界中,close 子句将节点添加到该闭集。每个子句(create 或 close)后面都跟着 token x、y、c0 和 c1—— 分别表示节点的坐标、自开始以来的成本值和启发值。
田渊栋团队之前提出的 Searchformer 已被证明可以有效解决多种复杂的决策任务。但是,它仍有两个不足。
1. 模型仅能以慢速模式运行并会输出很长的推理链,这会极大延长推理时间。尽管可通过 bootstrapping(一种迭代优化技术,包含 rollout 循环和之后的微调过程)来提速,但这样的过程会对计算资源产生显著的额外需求。
2. Searchformer 很难生成多样化的解答,因为其经常会采样相同的 rollout。举个例子,在他们测试过的 1000 个 30×30 迷宫问题中,Searchformer 的推理链平均包含 1500 多个 token,而只能在 64 个响应中找到 7.6 条各不一样的可行路径。
为了解决这些挑战,他们提出了一个利用随机化推理轨迹的训练框架。该方法的灵感来自两个研究方向:
这些观察再加上 dropout 技术(在训练时随机丢弃神经网络中的一些单元)的成功,促使该团队研究了随机化推理轨迹的作用,并且他们还希望通过利用结构化元素并选择性地丢弃每个训练示例的某些部分来简化 A* 搜索轨迹。该方法的细节如下。
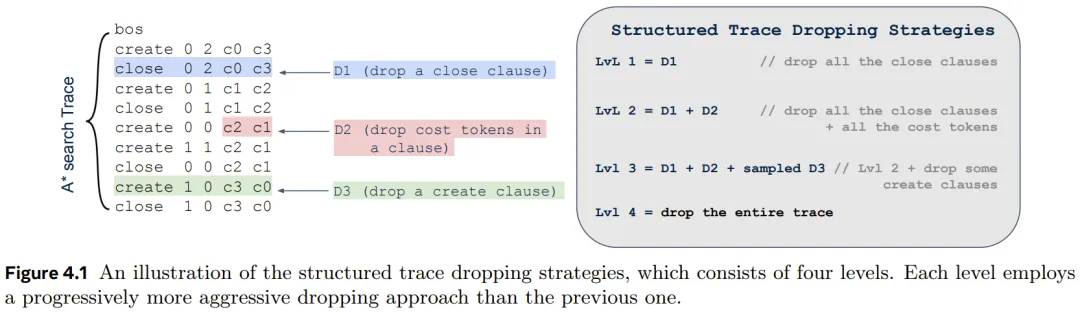
如图 4.1 所示,A* 搜索轨迹包含 create 和 close 子句,每个子句都包括节点的坐标及其到达起始位置和目标位置的(估计)成本。为了推导得到 Dualformer,他们利用了搜索轨迹的结构,并为每个训练示例丢弃轨迹中的某些部分。其有三种自然的丢弃类型:
基于此,他们开发出了四个层级逐层递进的丢弃策略:
图 4.1 基于上述迷宫任务演示了这些策略。后面我们会看到,这些策略可有效地引导 Dualformer 学习更简洁、更高效的搜索和推理过程。
为了提升训练数据的多样性,他们没有将丢弃作为一个数据预处理步骤。而是在推理时间,对于一个数据批次中的每个训练样本,都从一个分类分布 Cat (p_0, p_1, p_2, p_3, p_4) 中随机抽取丢弃策略,其中 p_1, . . . , p_4 是执行 Level 1-4 丢弃的概率,p_0 是保持完整轨迹的概率。这种训练框架可使 Dualformer 学习多个经过约简的轨迹,即使对于单个训练示例也是如此,因为同一个示例可能出现在多个批次中。
Dualformer 具有一个非常吸引人的特性:在推理时,可以轻松地通过提示词指定以快速或慢速生成模式运行。
该控制机制非常简单:在标准提示词之后添加一个 bos 和一个控制 token,其中控制 token 是 plan 或 create 中的一个。
如果使用 plan,则 Dualformer 将以快速模式运行,绕过推理步骤并直接输出规划。另一方面,如果在 bos 之后注入 create,则 Dualformer 将以慢速模式工作并生成推理轨迹和最终规划。下面基于迷宫任务展示了这两种模式的示意图。

而如果仅使用标准提示词,则 Dualformer 将模仿人类决策的双重过程 —— 根据情况,它会选择一种分别对应于系统 1 和系统 2 的推理类型进行响应。
实验的目标是解答以下三个问题:
1. Dualformer 在快速、慢速和自动模式下的表现是否优于相应的基线?
2. 在慢速模式下,Dualformer 是否能实现更快的推理,即输出更短的轨迹?
3. 结构化的轨迹丢弃技术是否适用于在自然语言数据集上训练的 LLM?
为了解答问题 1 和 2,该团队训练了求解迷宫导航任务和紧密相关的推箱子(Sokoban)任务的 Transformer。为了解答问题 3,他们微调了 LLama-3.1-8B 和 Mistral-7B 模型来解答数学问题。
迷宫和推箱子任务使用的数据集与 Searchformer 研究的一样。这里就不再赘述,我们直接来看结论。
研究表明,Dualformer 可以根据控制指令选择快速或慢速的运行模式。在快速模式下,它仅输出最终规划;在慢速模式下,它还会生成推理轨迹。该团队在不同的模式下让 Dualformer 对比了不同的基线。使用的指标包括生成规划的正确性、最优性和多样性、推理轨迹的长度等。
表 5.1 分别报告了在迷宫和推箱子任务上,Dualformer 和基线仅解答模型的性能。
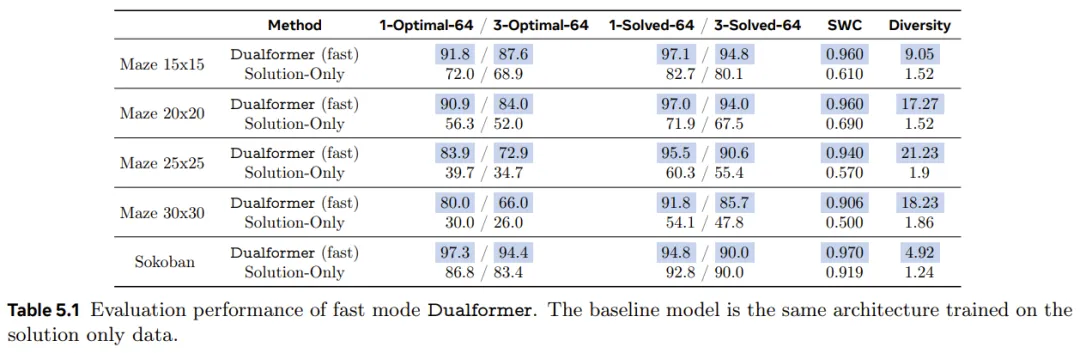
可以看到,在生成正确和最优规划方面,Dualformer 在 1-Solved-64 和 1-Optimal-64 指标上中都明显优于基线。它在 3-Solved-64 和 3-Optimal-64 指标上也明显超过了基线,这证明了 Dualformer 在规划生成方面的稳健性。
尤其需要注意,随着任务难度提升,Dualformer 的优势也会增大。对于最大的 30×30 迷宫,Dualformer 的 1-Optimal-64 成功率是仅解答模型的 2.8 倍,在 3-Optimal-64 上是 2.97 倍。
Dualformer 的 SWC 分数也比基线高得多 —— 在每个环境中都高于 0.9。这表明 Dualformer 生成的每个单独规划的质量都很高,其成本非常接近最佳规划。
在实验考虑的所有问题上,Dualformer 还能稳定地生成更多样化的规划。比如在下面这个迷宫示例中,随着迷宫规模的增加,Dualformer 的多样性得分(即 64 个响应中不同但正确的规划的平均数量)会增加。
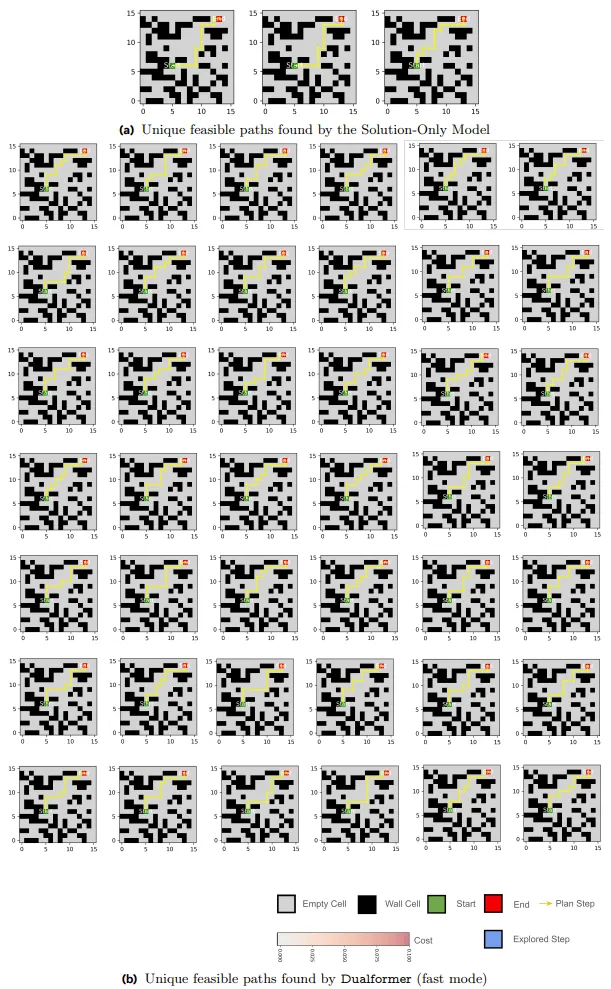
一般来说,随着迷宫规模增大,到达单个目标位置的可能路线也越来越多。这表明 Dualformer 学习了迷宫结构,而仅解答模型可能是记住了最佳规划,因为其多样性得分在所有迷宫规模下都接近 1。
表 5.2 报告了 Dualformer 在慢速模式下运行时的结果。
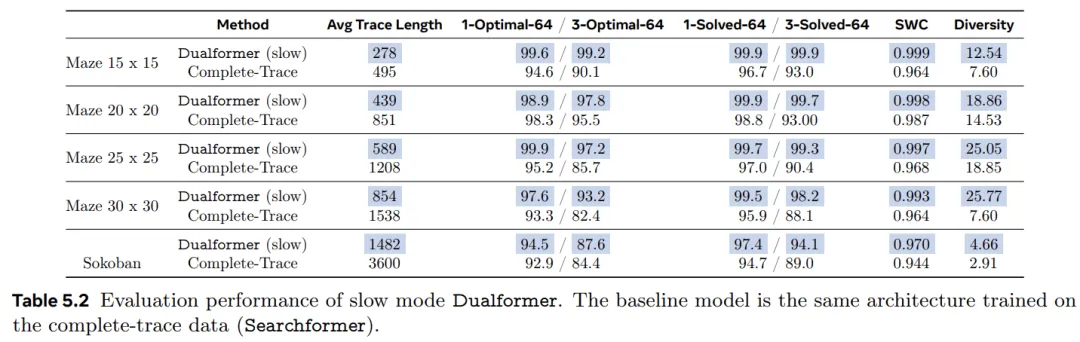
相应的基线是 Complete-Trace 模型,它使用相同的架构并在具有完整 A* 搜索轨迹的数据上进行了训练。除了之前报告的指标之外,该研究还报告了在所有 1000 个评估任务中汇总的 64 个响应的推理轨迹平均长度。结果表明,Dualformer 实现了更好的规划能力和推理速度。它在所有正确性和最优性指标方面都优于 Complete-Trace 模型:包括解决率、最优率和 SWC。
此外,Dualformer 产生的推理轨迹明显短于基线模型。平均而言,Dualformer 在五个任务中将轨迹长度减少了 49.4%。与以前一样,与基线相比,Dualformer 还生成了更多不同的规划。
Complete-Trace 模型是田渊栋团队的基本 Searchformer 模型。该方法还提出了一种搜索动态引导方法来提高其在推箱子任务上的性能,类似于 Anthony 等人(2017);Zelikman 等人(2022)的研究。
在训练 Searchformer 模型后,作者在新创建的自引导数据集上对其进行微调。对于原始数据集中的每个推箱子竞赛,此处生成 32 个答案,并将最短的最佳答案纳入新数据集。我们可以多次重复此过程。
通过这种方式,Searchformer 学会了生成更短的答案。表 5.4 将 Dualformer 与最多微调 3 步的 Searchformer 模型进行了比较。Dualformer 在大多数指标上与引导模型相当或更好,同时仅使用不到 45.1% 的推理步骤。

该团队发现,每个引导步骤需要推出 3.2 × 10^6 个总响应和 10^4 次迭代的额外微调。这意味着包括 8 × 10^5 次预训练迭代。Searchformer 步骤 3 总共需要 8.3 × 10^5 次训练迭代和 9.6 × 10^6 次 rollout,计算成本很高。相比之下,Dualformer 只需要一个由 8 × 10^5 次迭代组成的训练阶段,没有额外的 rollout 需求。
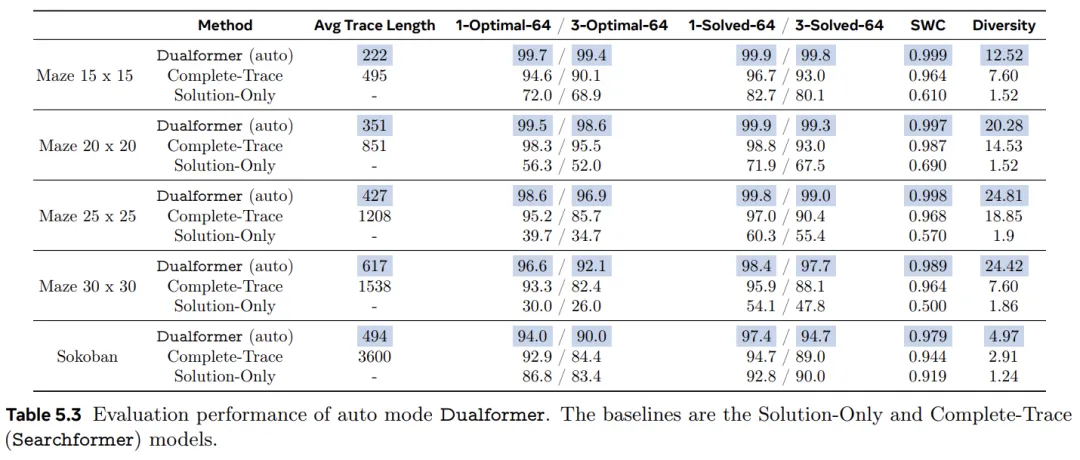
不仅能通过在 bos 之后注入控制 token 的方式来控制 Dualformer 的推理模式,还可以直接执行采样,使其自由确定操作模式,类似于人类决策的双重过程。这种 Dualformer 被称为自动模式。表 5.3 报告了结果。对于这里考虑的所有任务,自动模式 Dualformer 也优于 Complete-Trace 和 Solution-Only 模型。
作者展示了结构化轨迹丢弃技术在训练大规模 LLM 解决数学问题方面的有效性。具体来说,作者使用了包含各种数学问题和答案的数据集对 Llama-3-8B 和 Mistral-7B 模型进行微调,其中包含详细的推理步骤。其中使用了一种轨迹丢弃技术,该技术也利用了数学问题的推理轨迹的特定结构。
最后,作者再对生成的模型与直接在数据集上微调的相应基础模型进行基准测试。
结果见表 5.6。作者共测试了 p 的四个值:0.1、0.2、0.3 和 0.4。结果表明,新研究所提出的训练策略使这两个 LLM 更加有效和高效。
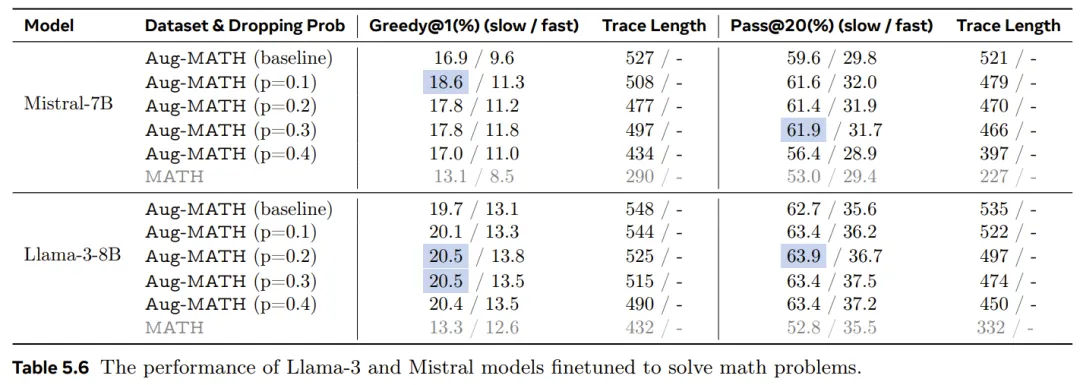
首先来看 Mistral-7B 模型的结果。对于慢速模式推理,使用轨迹丢弃和随机训练对模型进行微调可以改进直接在 Aug-MATH 数据集上微调的基线模型。当 p = 0.1 时,绝对 Greedy@1 指标提高了 1.7%(相当于 10% 的相对性能提升),当 p = 0.2 和 0.3 时提高了 0.9%,当 p = 0.4 时提高了 0.1%。当 p = 0.1、0.2 和 0.3 时,新模型也优于 Pass@20 指标的基线模型,其中绝对正确率增加到 61.9%。在两种评估方案下,推理轨迹的平均长度随着 p 的增加而下降。
同样,对于快速模式下的推理,新模型也实现了更高的正确率。Llama-3-8B 模型也具有类似的性能改进趋势。最后,为了供读者参考,作者还列出了在原始 MATH 数据集上微调的 Mistral-7B 和 Llama-3-8B 模型的结果。
文章来自于微信公众号“ 机器之心”




【开源免费】XTuner 是一个高效、灵活、全能的轻量化大模型微调工具库。它帮助开发者提供一个简单易用的平台,可以对大语言模型(LLM)和多模态图文模型(VLM)进行预训练和轻量级微调。XTuner 支持多种微调算法,如 QLoRA、LoRA 和全量参数微调。
项目地址:https://github.com/InternLM/xtuner
【开源免费】LangGPT 是一个通过结构化和模板化的方法,编写高质量的AI提示词的开源项目。它可以让任何非专业的用户轻松创建高水平的提示词,进而高质量的帮助用户通过AI解决问题。
项目地址:https://github.com/langgptai/LangGPT/blob/main/README_zh.md
在线使用:https://kimi.moonshot.cn/kimiplus/conpg00t7lagbbsfqkq0
