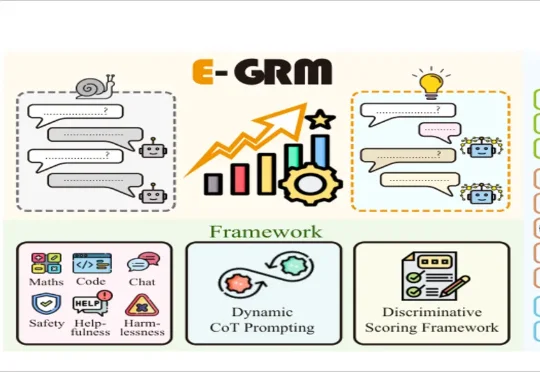
告别“无脑”长推理!腾讯E-GRM让模型学会“自我怀疑”:拿不准才多想,拿得准直接答
告别“无脑”长推理!腾讯E-GRM让模型学会“自我怀疑”:拿不准才多想,拿得准直接答E-GRM的核心思路就是让模型自己判断输入复杂度——通过多次采样看答案是否收敛。收敛了就直接回答,不收敛再触发CoT。在RM-Bench、RMB、RewardBench三个基准上,约58%的样本被智能路由到“直答”,延迟降低62%,同时准确率还有提升。
来自主题: AI技术研报
8042 点击 2026-07-25 11:37