# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
触觉是人类感知外部环境并与之交互的重要知觉形式。
现在,科学家们也正在制作柔性皮肤,试图将这种能力赋予机器人,使之能完成更为灵巧、复杂的操作。
比如,自适应地稳稳夹紧一颗鸡蛋:

现在流行的柔性触觉传感器包括:
问题是,如何使用简单的传感器结构和标定方法实现三维力的解耦仍是一个巨大的挑战——这意味着这些传感器通常在结构和制造上仍较为复杂,需要大量的校准过程,这限制了它们的广泛落地。
为解决这一问题,来自法国国家科学研究中心(CNRS)和香港大学的研究人员提出了一种基于柔性磁膜的触觉传感器。
通过设计正交磁化的Halbach阵列,该触觉传感器可以实现三维力的自解耦,将标定复杂度从三次方降低到一次方,极大地简化了传感器结构以及标定流程,为低成本的三维力触觉传感提供了新思路。
相关成果以“A soft skin with self-decoupled three-axis force-sensing taxels”为题,已发表在Nature子刊《Nature Machine Intelligence》上。
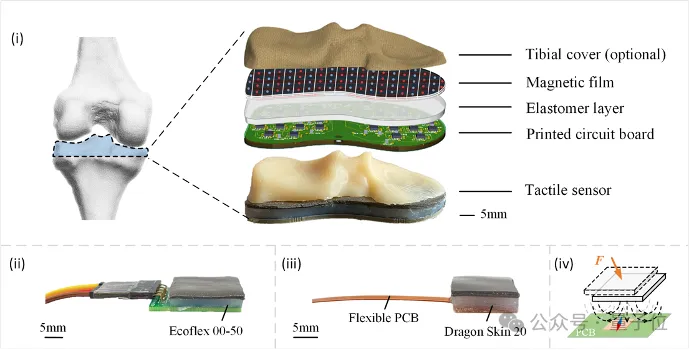
如图1所示,该触觉传感器的主体部分从上往下分为三层:柔性磁膜,弹性硅胶,以及PCB电路板(带有霍尔传感器)。
当磁膜在外力作用下发生变形后,磁膜与霍尔传感器之间的距离将发生变化,因此由霍尔传感器测得的磁场大小及方向也会随之发生变化,该三维磁场信息经过解耦算法可以被转换为三维力信息。
之前的研究表明单面多极正弦磁化的Halbach阵列有二维自解耦的特性,即在x-z平面内,磁感应强度B只和z方向有关,磁场方向RB只和x方向有关,因此可以用于二维力的自解耦。
由于磁场满足叠加原理,研究人员发现,将两个正弦磁化的Halbach阵列磁场进行正交叠加后,二维自解耦的特性在一定条件下通过简化可以被推广到三维。
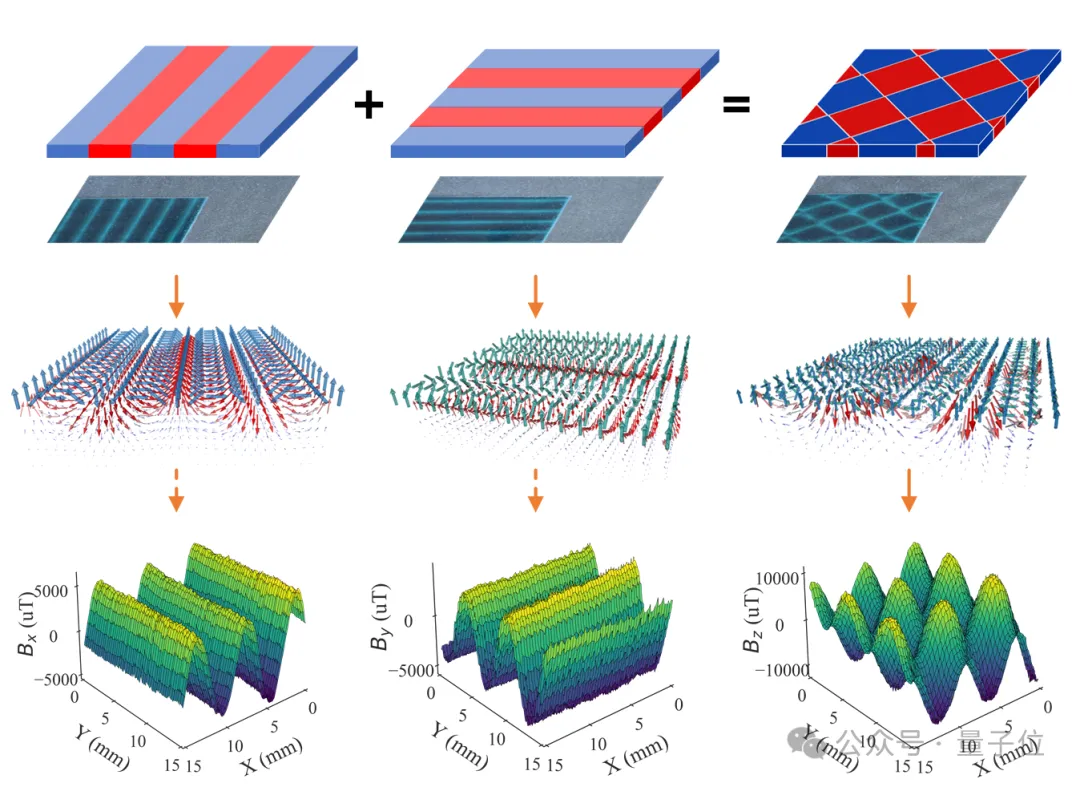
即B只和z方向有关,Rxz只和x方向有关,Ryz 只和y方向有关,其中B,Rxz,Ryz 在简化前后的归一化绝对误差(NAE)分别为2.88%、3%和4.56%。
基于正交磁化Halbach阵列三维自解耦的特性,三维力Fz、Fx、Fy可以分别通过B、Rxz、Ryz 解耦出来。
为了验证上述三维力自解耦方法的可行性,研究人员设计并制作了三个具有不同形状、大小、量程及灵敏度的触觉传感器,以用于不同的实际应用。
第一个应用是测量人工膝关节处的三维力分布:
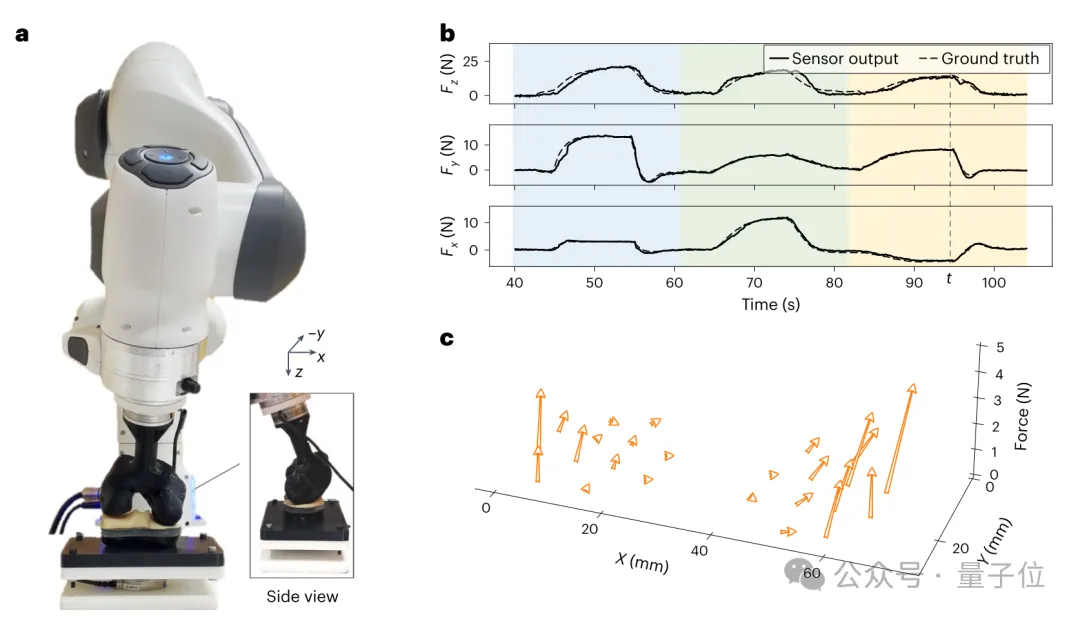
膝关节由3D打印而成,下半部分由触觉传感器(含24个传感单元)及ATI六维力/力矩传感器组成;上半部分由机械臂驱动模拟人类膝关节的弯曲和滑动。

验显示,触觉传感器可以提供实时的三维力分布测量,且测得的合力与真实值(来自ATI传感器)误差很小。
另一个应用是基于触觉的教机器人制作咖啡。
如下图所示,研究人员将一个可以检测力和力矩的3x3触觉传感器阵列安装在了机械夹爪的一端(取矩点为传感器中心),当操作员轻触或滑动传感器表面的时候,传感器将检测到相应方向的力和力矩。

该力和力矩乘以一个增益矩阵(gain matrix)之后将被分别转换为机械臂末端执行器的运动增量(移动+转动),并通过一个阻抗控制器(impedance controller)更新机械臂的末端姿态。
机械夹爪的开合可由特定的触觉信号编程控制,如快速上下滑动传感器表面控制“关闭夹爪”,快速上下摇动所夹物体控制“打开夹爪”。
通过直接和传感器或所夹物体交互,机械臂及夹爪可以被精确控制并依次完成夹持水杯、倒水:
以及舀取咖啡粉,搅拌咖啡,放回咖啡勺等动作。

在这一过程中示教人员无需按压示教按钮(即传统示教方法),可以直接和物体交互,提供了一种更直观简单的示教方式。
示教结束后,机械臂及夹爪只需要重复示教过程中记录的运动轨迹及开合状态即可完成咖啡的制作。研究人员表示由于未使用视觉反馈,轨迹重复阶段所有物品的位置都需与示教阶段一致,之后可通过引入视觉反馈和AI算法来实现更加智能和通用的模仿学习。
另外,通过编程,可以切换机械臂示教模式和自适应抓取模式(根据切向力实时动态调整法向夹持力)。
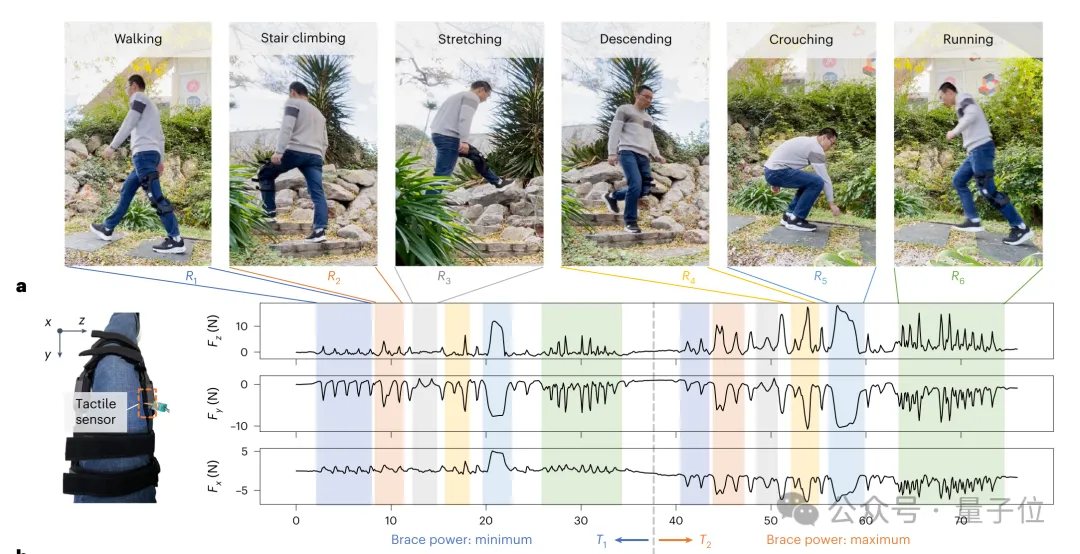
研究人员还展示了柔性PCB基底的触觉传感器在可穿戴设备中的应用。如下图所示,通过将一个具有柔性PCB基底的触觉传感单元放置于膝盖支架(knee brace)内侧,我们可以监测使用者在日常活动过程中膝盖支架与腿部的三维接触力,这展示了三维柔性触觉传感器在健康监测领域的潜在应用。
本文的作者包括来自法国国家科学研究中心CNRS-LIRMM实验室的闫友璨(博士后研究员),Ahmed Zermane(博士),Abderrahmane Kheddar教授,以及香港大学的潘佳教授。
SharedIt免费在线阅读链接: https://rdcu.be/d0I9p
文章链接:https://doi.org/10.1038/s42256-024-00904-9
文章来自于“量子位”,作者“CNRS”。



